注:本文包含 AI 辅助创作
Paper Summary
- 整体总结:
- 论文展示了通过训练模型改进 Self-reflection (注意不是训练特定任务),可以显著提升 LLM 的性能
- 这种间接方法仅依赖于一个验证器(validator),用于检测模型响应是否正确
- 注:特别适用于响应易于验证的任务(例如 JSON 输出格式是否正确、生成的代码是否可执行或方程约束是否满足)
- 论文通过在 APIGen 函数调用和 Countdown 数学方程求解数据集上的实验验证了方法的有效性
- 研究核心发现:
- 通过 GRPO 训练的 Self-reflection 模型在函数调用测试集和 Countdown 数学方程数据集上均有不错的提升
- 较小的 Self-reflection 训练模型可以超越更大的未训练模型;例如:
- 经过训练的 Qwen-2-7B Instruct 在函数调用上表现优于未训练的 Qwen2-72B Instruct
- 经过训练的 Qwen2.5-7B Instruct 在 Countdown 数学方程上表现优于 Qwen2.5-72B Instruct
- 论文的模型还对灾难性遗忘表现出鲁棒性
- 特别发现:尽管论文仅训练模型改进 Self-reflection,但论文发现即使不需要 Self-reflection(即第一次尝试就成功),模型的表现也显著提升
- 作者猜测这是因为通过专注于 Self-reflection 而非特定任务,模型可能更普遍地提升了其推理能力
- 局限性:本文未研究 Self-reflection 训练是否可以泛化到不同任务
- 总结:论文提供了一种更实用、更可靠的新范式,能够在有限的外部反馈下提升性能
- 论文探索了一种通过 Self-reflection 和 RL 提升 LLM 性能的方法
- 论文通过激励模型在其回答错误时生成更好的 Self-reflection
- 论文证明了在无法生成合成数据(synthetic data)且仅能获得二元反馈(binary feedback)的条件下,模型解决复杂可验证任务的能力也能得到提升
- 论文的框架分为两个阶段:
- 第一阶段,当模型未能完成任务时,它会生成一段 Self-reflection 评论来分析之前的尝试;
- 第二阶段,模型将这段 Self-reflection 纳入上下文后重新尝试完成任务,如果后续尝试成功,则对 Self-reflection 阶段生成的 token 进行奖励
- 实验表明该方法在各种模型架构上均取得了显著的性能提升
- 数学方程编写的性能提升高达 34.7%
- 函数调用的性能提升达 18.1%
- 特别地:经过微调的 1.5B 至 7B 参数的小模型在相同模型家族中表现优于参数规模大 10 倍的模型
Introduction and Discussion
- LLM 在自然语言处理任务(2023)、数学(2023; 2024)和推理(2023)等领域展现了令人印象深刻的能力
- 但当前模型仍存在盲点,且无法保证一个模型在成功完成某项任务后,能够成功完成另一项类似任务(2023; 2024)
- 解决方案一:针对失败任务的数据重新训练或微调模型,但如果此类数据集不存在,则可能无法实现
- 特别地,在 SOTA 超大模型也难以完成任务的情况下(某些情况下是可能出现的),此时我们无法利用它们生成合成训练数据(2024)
- 解决方案二:提示模型解释其推理过程或反思失败原因,比如
- CoT 范式(2022)表明,如果模型被提示展示其推理过程而不仅仅是提供答案,其在算术、常识和推理任务中的表现会显著提升
- Self-reflection 遵循类似的原理:如果能检测到大语言模型提供了错误答案,可以提示其反思推理中的缺陷并尝试重新回答(2023; 2024)
- 以上这些方法的主要优势在于不需要额外的训练数据,但其效果直接依赖于推理或反思提示的有效性
- 解决方案一:针对失败任务的数据重新训练或微调模型,但如果此类数据集不存在,则可能无法实现
Related Work
Self-reflection
Self-reflection in LLMs
- Self-reflection,也称为自省(introspection),是一种元提示策略(metaprompting strategy),语言模型通过分析自身的推理过程来识别和纠正潜在错误
- Self-reflection 范式在大语言模型研究中获得了广泛关注,被视为提升多步推理和问题解决能力的有效手段,尤其是在算术、常识推理和问答等领域(2022; 2023; 2024; 2023)
- 典型的 Self-reflection 流程包括生成初始答案、生成自然语言反馈以批判该答案,然后基于反馈优化回答
- 这一过程可以进行迭代,通常使用同一模型生成和评估解决方案,并可能包含记忆缓冲区或显式的元指令模块(2025; 2025)
- 注:Reflexion 其实是 Self-reflection 的一种实现?
Approaches and Limitations
- 大语言模型的 Self-reflection 方法在多个维度上存在差异
- 一些方法仅对失败或低置信度的查询进行自我纠正
- 另一些方法则对每个回答都应用 Self-reflection;
- 反馈可以是标量分数、外部标注或自然语言形式,并可能由人类、外部模型或大语言模型自身生成(2022; 2023; 2022; 2024)
- 在许多场景中提示大语言模型进行 Self-reflection 确实能提高准确性,但最近的研究表明,其效果高度依赖于上下文:挑战包括
- 在没有真实标签或外部验证的情况下无法可靠识别自身错误、重复反思的收益递减
- 对于简单提示或高性能基础模型可能导致性能下降的风险(2024; 2024; 2023)
- 特别是,当初始准确率较低、问题难度较高且存在外部验证时,Self-reflection 的效果最为显著
- 大语言模型有时可能无法识别自身错误 ,在存在外部监督的情况下能从反馈中受益(2024; 2023)
Training-Based Methods
- 最近的研究方向聚焦于在模型训练阶段融入自我提升能力,例如通过微调自我纠正轨迹或将流程建模为多轮强化学习问题(2024; 2024; 2025)
- 这些基于训练的方法表明,在训练过程中利用模型自身的批判能够带来持久的改进——即使在没有 test-time Self-reflection 的情况下
- 这些方法通常依赖于更大的教师模型生成数据或提供监督,这可以被视为一种知识蒸馏(2015)
本篇论文的方法
- 基于先前研究的观点,论文提出仅针对外部验证器识别的失败案例进行纠正,将其二元反馈转化为 Self-reflection 提示,并训练模型利用 Self-reflection 在第二次尝试中取得成功
- 这种基于验证器的条件计算利用了训练时的 benefits 以减少测试时的开销(overhead),并且能够保证性能提升或至少保持不变
- 因为论文的纠正仅应用到初始错误的样本
- 在训练中,论文采用了 GRPO
- 特别说明:该方法仅从模型自身的输出中自举(bootstraps),无需依赖外部大语言模型
Reinforcement Learning for Language Models
GRPO(Group Relative Policy Optimization)
- GRPO 是一种基于结果的强化学习方法,旨在解决 LLM 在复杂数学推理任务中面临的独特挑战(2024)
- 与传统方法如近端策略优化(Proximal Policy Optimization, PPO)(2017)不同,GRPO 摒弃了单独的价值(评论)网络,而是通过比较一组采样生成的结果直接估计优势
- 这使得 GRPO 特别适用于监督信号稀疏且仅在生成结束时可用的情况
- 例如,仅能通过标量奖励反映输出质量或正确性的任务
- 在这种环境中,模型必须在接收到任何反馈之前生成完整的序列
- GRPO 的优势函数可以表示为:
$$
A(s, a) = R(s, a) - \frac{1}{|G|} \sum_{a’ \in G} R(s, a’)
$$- 其中 \( A(s, a) \) 是状态 \( s \) 和动作 \( a \) 的优势值,\( R(s, a) \) 是奖励函数,\( G \) 是一组采样生成的动作
本篇论文的方法
- 论文采用 GRPO 作为唯一的强化学习机制,不涉及额外的监督微调阶段
- 最近的研究表明,调整 GRPO 的奖励结构可以有效鼓励模型在失败后继续尝试,例如通过奖励失败后的重试行为,从而促进自我纠正和鲁棒性(2025)
- GRPO 在需要复杂行为监督的相关领域也展现出潜力,包括工具使用和高级数学问题求解,为多样化的大语言模型应用提供了灵活高效的优化策略(2025; 2025)
Reflect, Retry, Reward
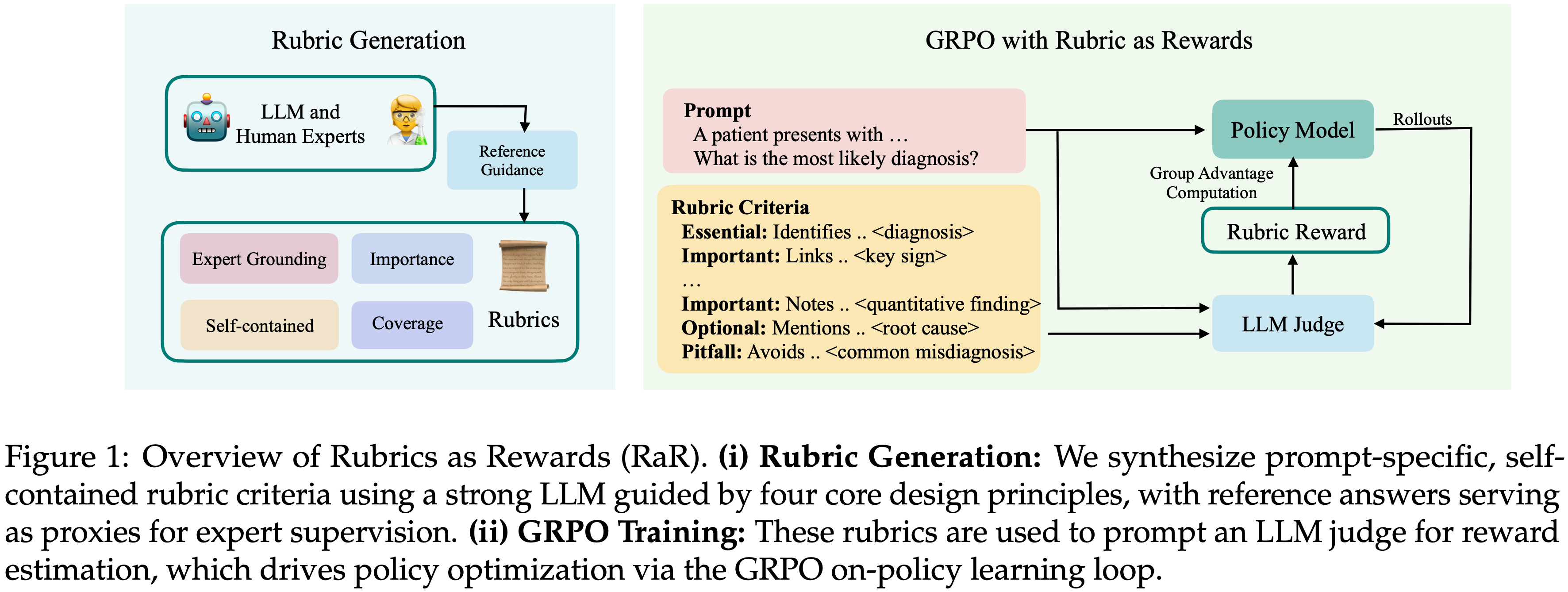
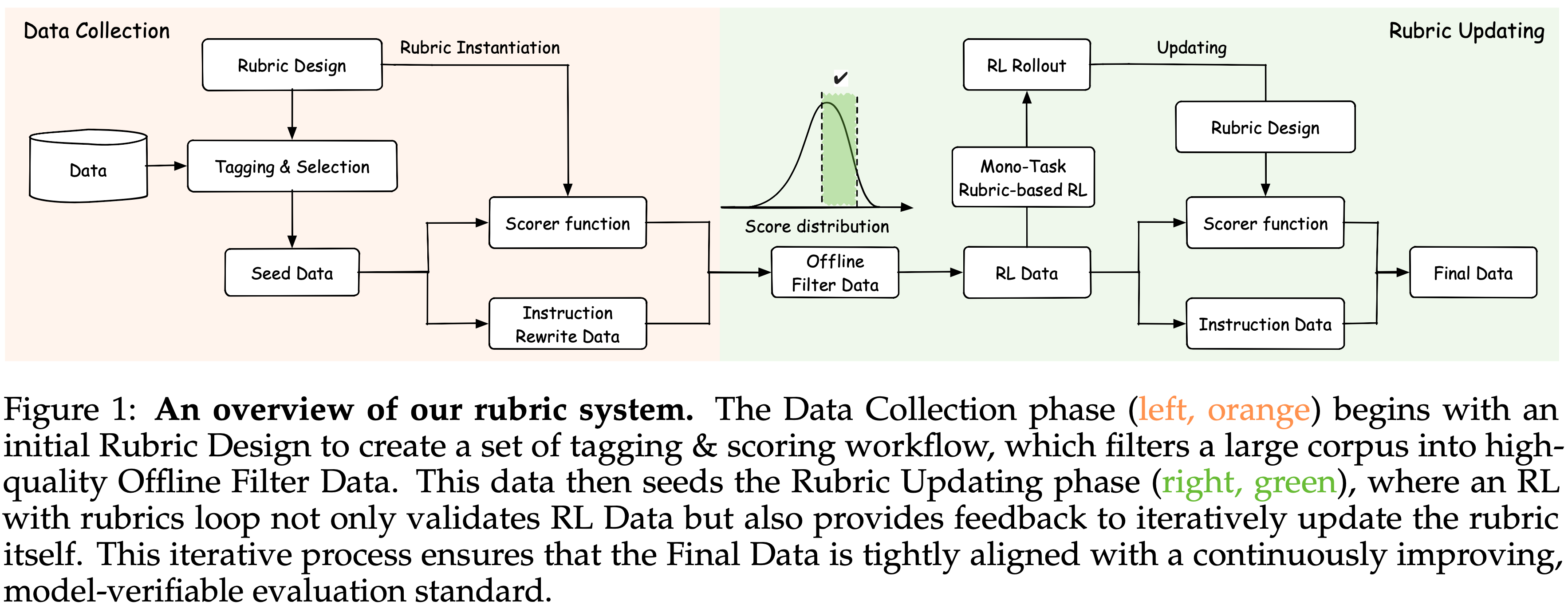
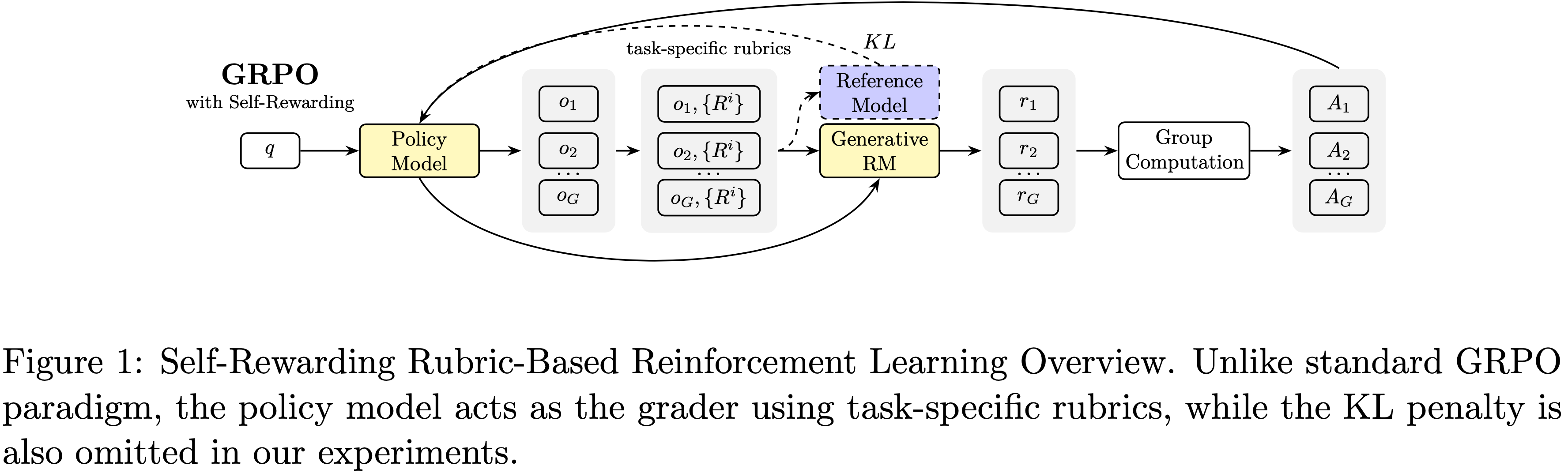
- 论文的新颖 Reflect, Retry, Reward(反思、重试、奖励)方法按以下方式运行,如图 1 所示
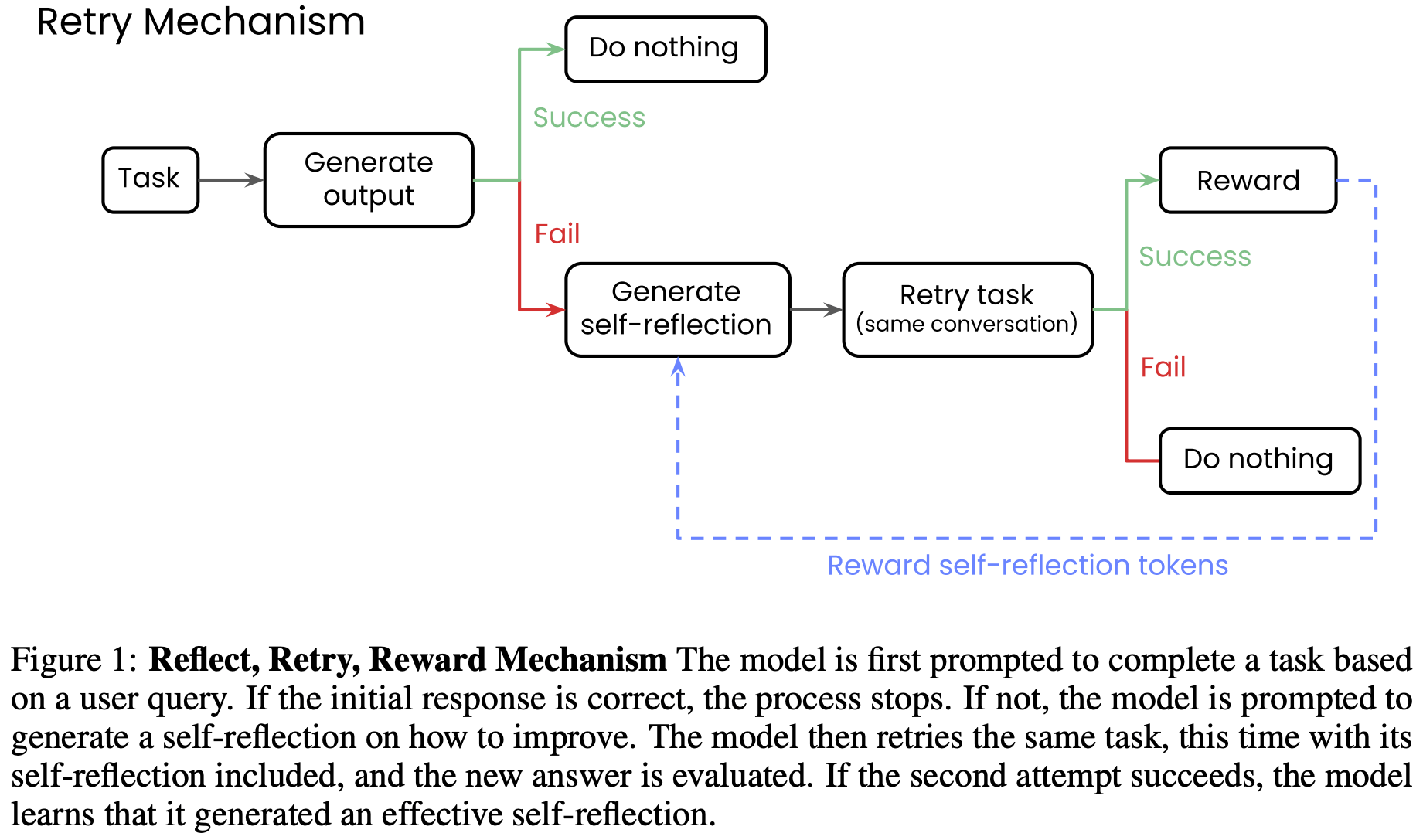
- 具体步骤如下:
- 第一步 :模型在提示完成一项任务
- 如果成功 ,论文不做任何操作,因为模型已经满足需求
- 如果失败 ,论文会提示模型生成一段 Self-reflection,分析可能出错的原因
- 这需要一个验证器(validator)来自动评估响应是成功还是失败(二元判断)
- 虽然在某些任务中可以定义不依赖真实标签的验证器(例如基本的 API 函数调用(API 调用是否返回有效响应?)、数学方程(方程是否计算为目标答案?)或代码(生成的代码是否能执行?)),但某些任务类型可能需要真实的目标答案作为验证标准
- 第二步 :生成 Self-reflection 后,模型会利用对话历史中的反思内容进行第二次尝试
- 如果仍然失败 ,论文不做任何操作;因为 Self-reflection 不足以将失败转化为成功
- 如果成功 ,论文会使用 GRPO 仅奖励在 Self-reflection 阶段生成的 token
- 通过将所有其他生成 token 的优势项(advantage terms)设为零来实现
- 理解:其他生成 Token 肯定包含了第二步失败的 Token,但是包含了第一步成功的吗?【应该不包含吧?】
- 论文这样做是因为作者希望模型学会更普遍地进行 Self-reflection,而不是针对特定任务进行专门优化
- 换句话说,论文不奖励正确答案,只奖励 Self-reflection
- 第一步 :模型在提示完成一项任务
Experiments
- 论文通过两个不同任务的实验证明了方法的有效性:函数调用(function calling)和数学方程(math equations)
Function Calling
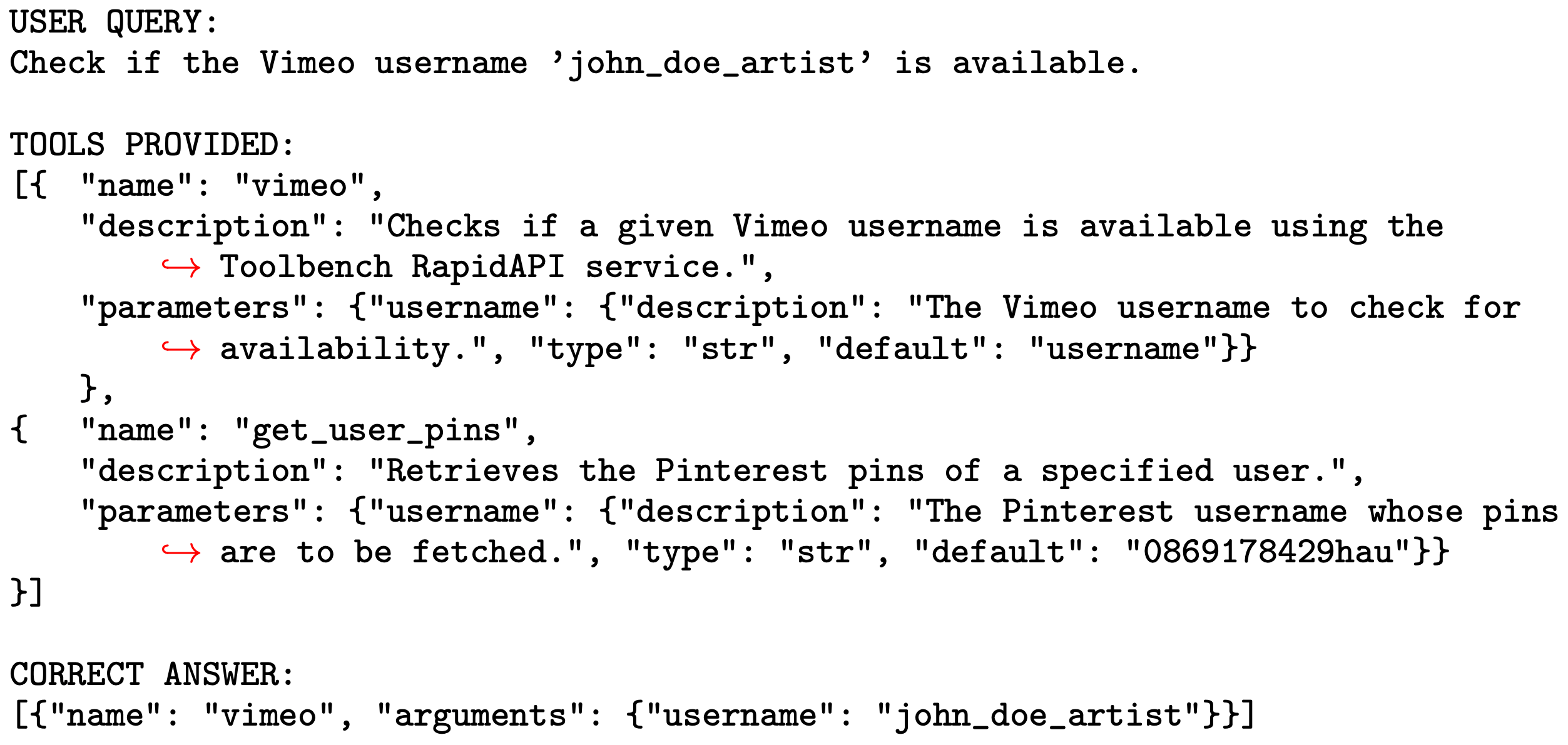
- 论文使用 APIGen 数据集(2024b)进行函数调用实验
- APIGen 是一个包含 60,000 个高质量函数调用的数据集,每个数据点包括用户查询(纯文本)、可能用于回答查询的工具列表(JSON)以及正确格式化的函数调用(JSON)
- 数据集中共有 4,211 个特有的工具,每个工具平均有 2.3 个参数,每个用户查询平均有 2.8 个可选工具(1-8 个)
- 只有当模型不仅选择了正确的工具,还生成了正确的参数和值时,才被认为正确
- 下面是一个挑选两个工具的示例
- 为了保持实验的完整性,论文仅评估在 APIGen 数据集发布(2024 年 6 月)之前发布的模型
- 论文报告了 Qwen2(1.5B/7B Instruct)(2024)、Llama3.1(8B Instruct)(2024)和 Phi3.5-mini Instruct(2024)的结果
- 论文还报告了 Qwen2-72B Instruct、Llama3.1-70B Instruct 和 Writer 的 Palmyra X4(2024)的基线性能
- 论文是 Writer 公司发表的,所以选了他们的模型
- 因为不同模型家族有不同的建议 tool-calling 方法,作者为每个模型家族都测试了不同的模版并最终选择最好的模版
- 对于函数调用验证器,论文要求模型输出与数据集中的正确答案完全匹配(即基于真实标签)。论文使用以下提示生成失败函数调用尝试的 Self-reflection:
You tried performing the task, but failed in generating the correct tool call. Reflect on what went wrong and write a short explanation that will help you do better next time.
- 基本思路是:告诉模型未能生成正确的工具调用,让模型反思出错原因,并写一段简短的说明,以帮助模型下次做得更好
Countdown Math Equations
- 论文使用 TinyZero 项目引入的 Countdown 数据集(2025a, 2025b)进行数学方程实验
- Countdown 数据集包含 450k 组 3-4 个数字和一个目标数字
- 目标是通过对数字应用基本算术运算,给定一组数字和目标值,仅用加减乘除构造等于目标的等式,每个数字仅用一次,常作为推理 / 强化学习的训练任务
- 只有当模型使用了所有数字(顺序不限)且最终方程成功计算为目标数字时,才被认为正确
- 示例如下:
Using the numbers [4, 73, 4, 23], create an equation that equals 76. You can use basic arithmetic operations (+, -, *, /) and each number can only be used once.
- 同样,为了保持实验完整性,论文仅评估在 Countdown 数据集公开(2025 年 1 月)之前发布或知识截止日期早于该日期的模型
- 论文报告了 Qwen2.5(1.5B/3B/7B Instruct)(2025)、Llama3.1(8B Instruct)、Llama3.2(3B Instruct)和 Writer 的 Palmyra 1.7B 的结果
- 论文还报告了 Qwen2.5-32B Instruct、Qwen2.5-72B Instruct、Llama3.1-70B Instruct 和 Palmyra X4(2024)的基线性能
- 对于数学方程验证器,论文要求生成的方程与提示中的目标答案匹配(即不需要真实标签)。论文使用以下提示生成失败 Countdown 数学方程的 Self-reflection:
You tried solving the problem and got the wrong answer. Reflect on what went wrong and write a short explanation that will help you do better next time.
- 基本思路是:告诉模型尝试解决问题但得到了错误答案,让模型反思出错原因,并写一段简短的说明,以帮助下次做得更好
A Dataset of Failures
- 出于效率和分析考虑,论文没有在完整的函数调用和数学方程训练集上训练模型,而是选择首先为每个任务创建一个失败数据集
- 论文为每个任务的每个模型生成最多 64 个响应(根据模型大小调整),并仅保留模型失败的查询(基于任务相关的验证器)
- 论文通常为较大的模型生成更多响应,因为它们失败频率较低,否则会得到更少的训练样本
- 这种方法有几个优点
- 第一:它节省时间,因为模型已经能成功处理的查询是无法从中学习的
- 第二:通过为每个查询生成多个响应,数据更具鲁棒性
- 第三:通过仅包含失败案例,我们可以精确确定模型需要多少样本才能收敛到最佳 Self-reflection
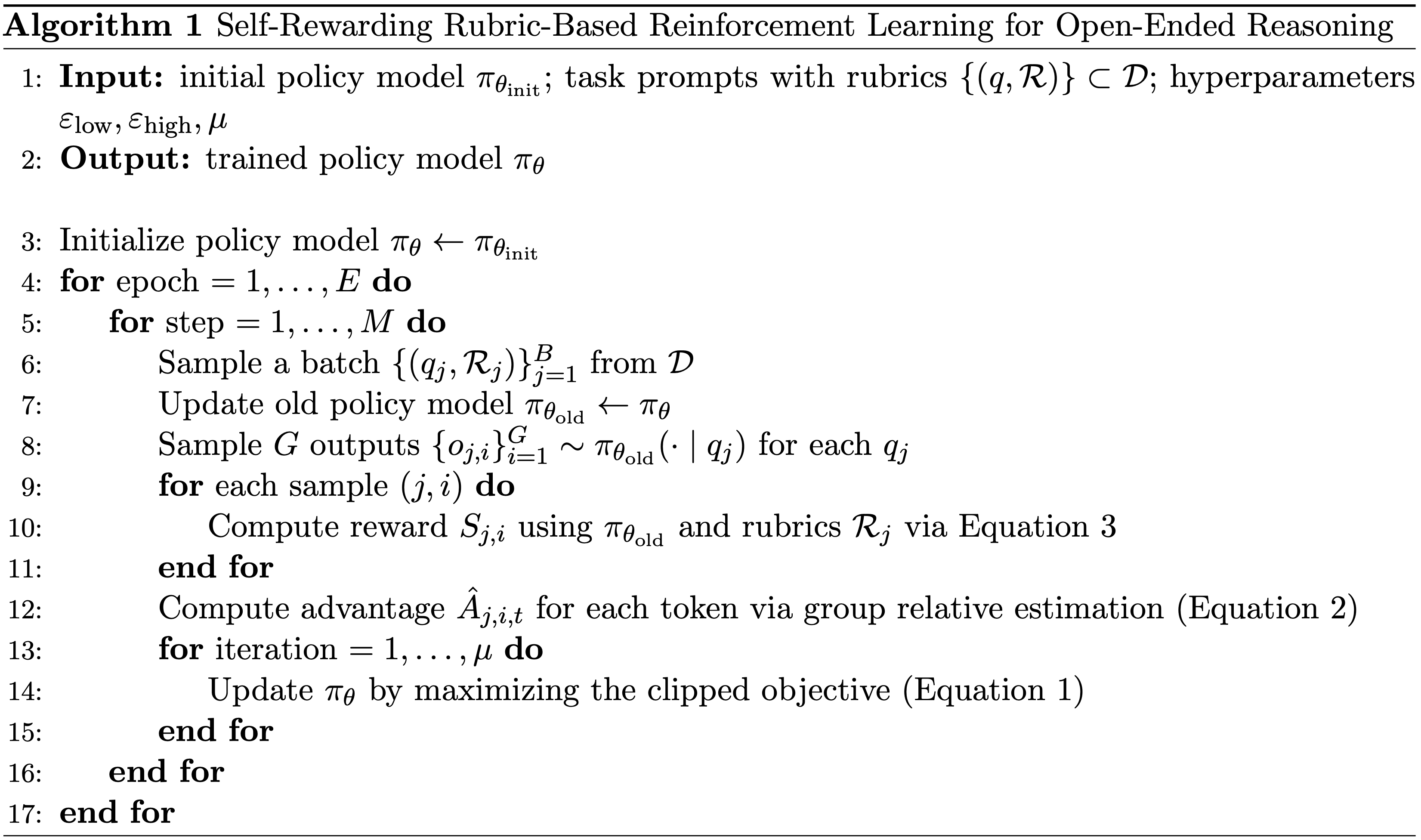
Multi-Step GRPO
- 论文以 TRL 框架(2020)为基础,实现了多步 GRPO 算法(即从 Self-reflection 后的第二次尝试中学习)
- 论文扩展了 GRPOTrainer,并修改其
_prepare_inputs函数以调用second_step函数- 该函数在 GRPOTrainer 生成的补全基础上执行另一步生成,而不影响 GRPOTrainer 已计算的掩码(mask)
- 由于论文在失败数据集上操作,模型生成的 Self-reflection 文本的掩码对应其 token
- 这样,我们可以在初始补全上执行任意数量的后续步骤,并仅奖励初始补全对应的 token(通过 GRPOTrainer 生成的掩码)
- 论文在失败数据集上训练模型,最多 1,750 步,有效批次大小为 256 个失败样本(尽管大多数模型收敛得更快)
- 例如,Llama-3.1-8B Instruct 的函数调用实验仅需 100 个训练步骤,使用了不到 2,000 个独特查询
- 所有函数调用实验平均使用了不到 25,000 个独特查询,数学方程实验平均使用了约 15,000 个独特问题
- 论文使用了标准 GRPO 训练参数(2024),并进行了超参数实验
- 最终实验中,KL 散度系数设为 0.001,学习率为 5e-7,采用余弦退火调度和 0.03 的预热比例
- 每个模型使用 4 到 8 个 H100 GPU 进行训练。由于 GRPO 的计算效率和可扩展性问题(2025),论文将实验限制在 1.5B 到 8B 亿参数的模型
- 除了以上实验结果外,作者还在一些小模型上进行实验,论文没有 Report 这部分实验:
- 这些实验速度快,但是他们生成正确答案和 self-reflect 的能力非常有限(比如 Qwen2/Qwen2.5 0.5B Instruct and Llama3.2-1B Instruct)
- 相似地,尽管微软的 Phi 3.5 小模型也能完成 Function Calling,但在 equation writing 方面能力不行
Experimental Results
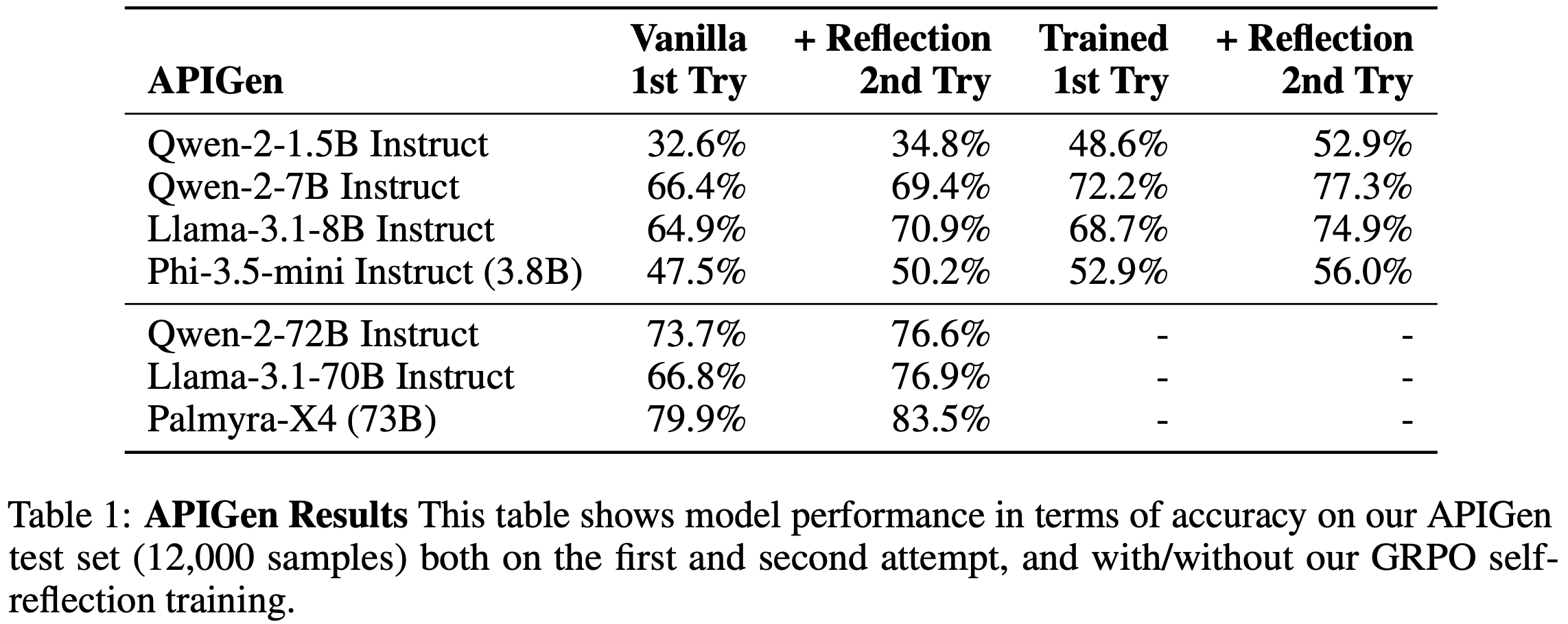
- 论文的主要实验结果如表 1 和表 2 所示
- 表 1 展示了各模型在 APIGen 测试集(12,000 个样本)上第一次和第二次尝试的表现(包括训练前后的对比)
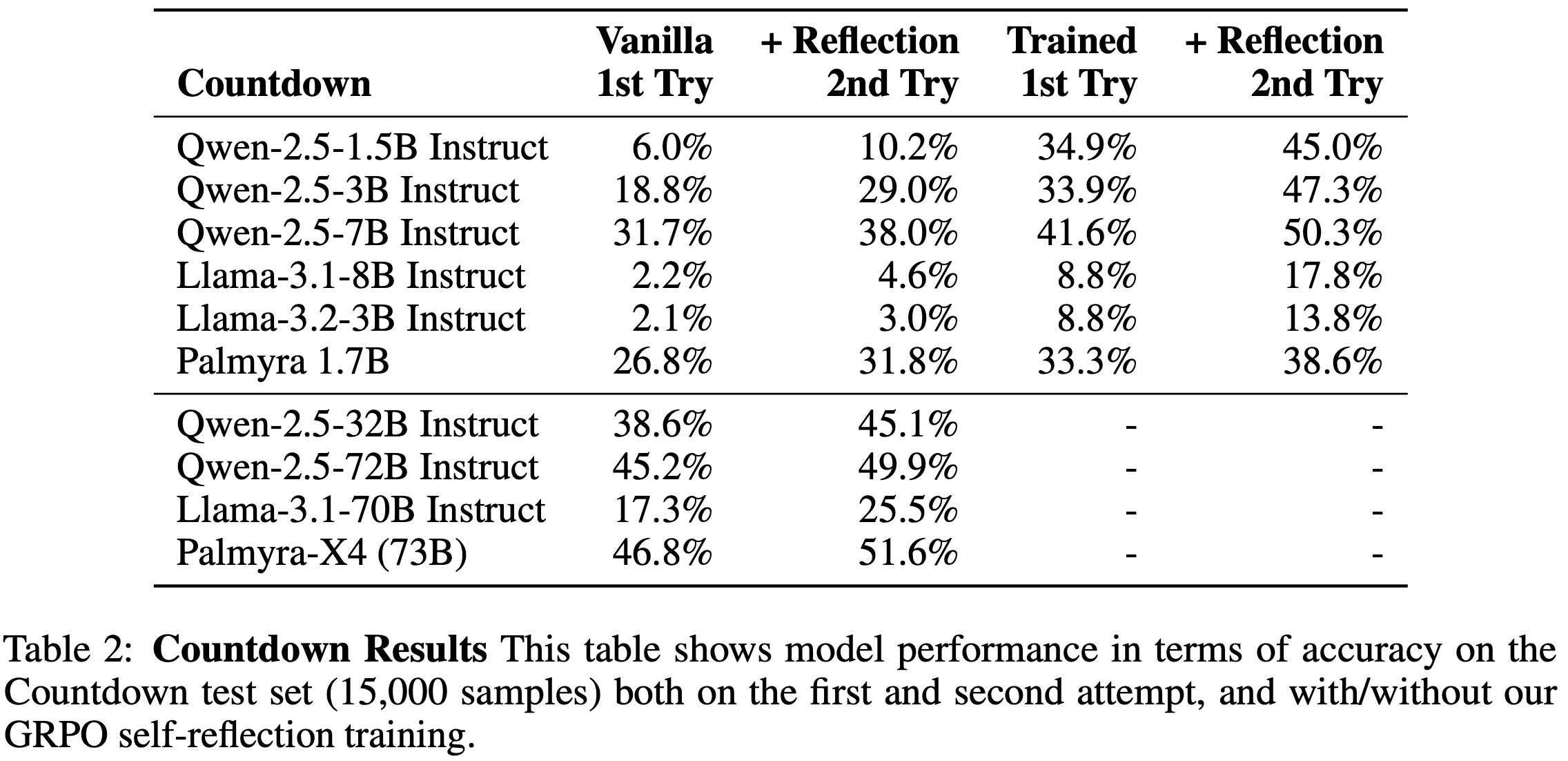
- 表 2 展示了在 Countdown 测试集(15,000 个样本)上的相同数据
- 表 1 展示了各模型在 APIGen 测试集(12,000 个样本)上第一次和第二次尝试的表现(包括训练前后的对比)
- 在 APIGen 方面
- 第一次尝试的表现与模型大小完全正相关(符合预期)
- 包括 Vanilla 1st Try 和 Trained 1st Try
- 通过 Self-reflection 的第二次尝试,模型表现平均提升了 4.5%,这与之前的研究一致
- 最大的提升出现在 GRPO 训练之后:
- 尽管论文仅奖励 Self-reflection 生成的 token ,几乎所有 Trained 模型在一次尝试后就能超越 Vanilla 模型两次尝试的表现
- 理解:这说明训练是非常有用的
- 作者猜测这是因为 Self-reflection 的 token 通常有助于模型推理,因此即使不需要显式生成 Self-reflection,模型也能受益
- 尽管如此, Self-reflection 在训练后仍然有帮助,当模型可以通过 Self-reflection 进行第二次尝试时,表现平均进一步提升了 4.7%
- 特别地,经过 GRPO 训练的 Qwen-2-7B 模型(在两次尝试后),其表现甚至超越了未训练的 Qwen-2-72B 模型(在两次尝试后),尽管后者规模是前者的 10 倍
- 第一次尝试的表现与模型大小完全正相关(符合预期)
- 在 Countdown 方面
- 整体表现较低,尤其是未训练的 Llama 模型(包括 Llama-3.1 和 Llama-3.2)在这一任务上表现非常糟糕
- Llama-3.1-70B 模型的表现甚至不及 Qwen-2.5-3B 模型(规模小 20 倍的)
- 性能提升的模式与 APIGen 实验类似,但幅度略高:
- Self-reflection 在训练前和训练后分别平均提升了 5.3% 和 8.6%
- 作者猜测这些更大的提升是因为模型的初始基线较低,因此有更多的学习空间
- 论文的发现不仅验证了之前关于 Self-reflection 益处的研究,还展示了通过 GRPO 优化 Self-reflection 可以进一步提升性能
Better Self-reflections
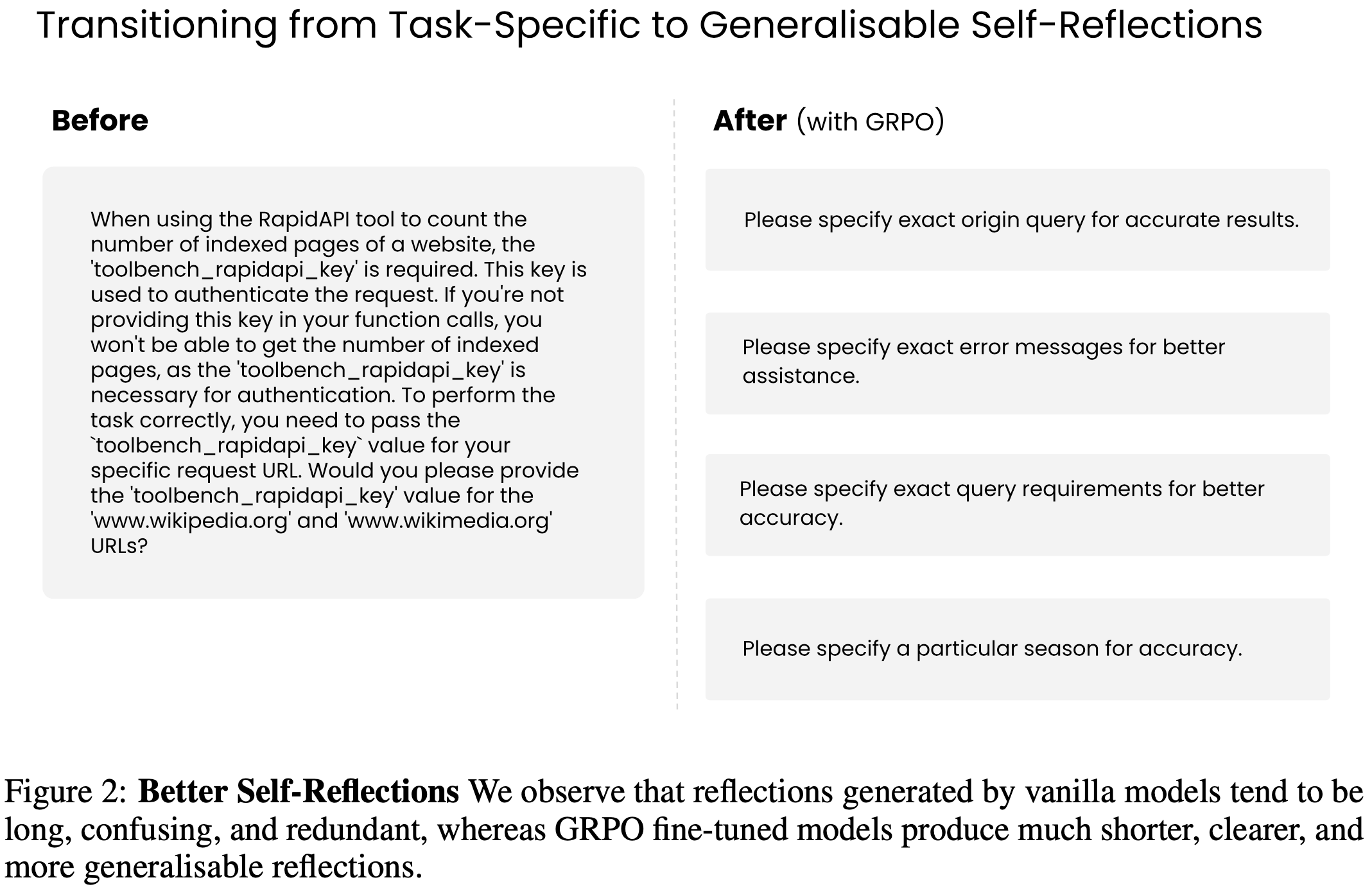
- 为了展示 Self-reflection 训练如何改进 Self-reflection 的质量,论文在图 2 中提供了一个定性示例,对比了未训练模型和经过 GRPO 训练的模型生成的 Self-reflection
- 可以明显看出,未训练的 Self-reflection 更长、更冗长且重复,而训练后的 Self-reflection 更简洁、清晰且通用
- 尽管这直观上合理(人类也更喜欢简短、清晰的指令),但这一发现与思维链(Chain-of-Thought)式输出的观点形成对比,后者被认为表现更好恰恰是因为其更冗长
- 论文将其作为一个开放问题:何时生成简洁或冗长的输出对模型更有利
- 理解:图2 展示的是 self-reflection 的内容,经过 GRPO 训练后,给出的 self-reflection内容都很简单且直接,而且不包含 CoT;而训练前的内容一般是非常冗长的
- 一个猜测是因为问题不够复杂,简单的提示就够了,或者模型的 CoT 反而容易引入错误,导致模型学到在 self-reflection 时不要加入过多的 CoT 内容
- 一个猜测是因为问题不够复杂,简单的提示就够了,或者模型的 CoT 反而容易引入错误,导致模型学到在 self-reflection 时不要加入过多的 CoT 内容
Low Catastrophic Forgetting
- 微调模型时的一个常见问题是灾难性遗忘(catastrophic forgetting),即模型在某一任务上过度专业化而牺牲其他任务的性能(2016; 2017; 2024)
- 论文的 Self-reflection 训练旨在以任务无关的方式提升性能,论文在多个多样化基准(MMLU-Pro、GSM8K、Hellaswag 和 MATH)上评估模型,以衡量其在语言理解、数学问题解决和常识推理方面的能力
- 论文使用常见的评估框架 lm-eval(2024)进行测试
- 作者的假设是:性能应保持相对稳定,因为论文从未针对特定任务进行优化,而是优化通用的 Self-reflection 推理能力
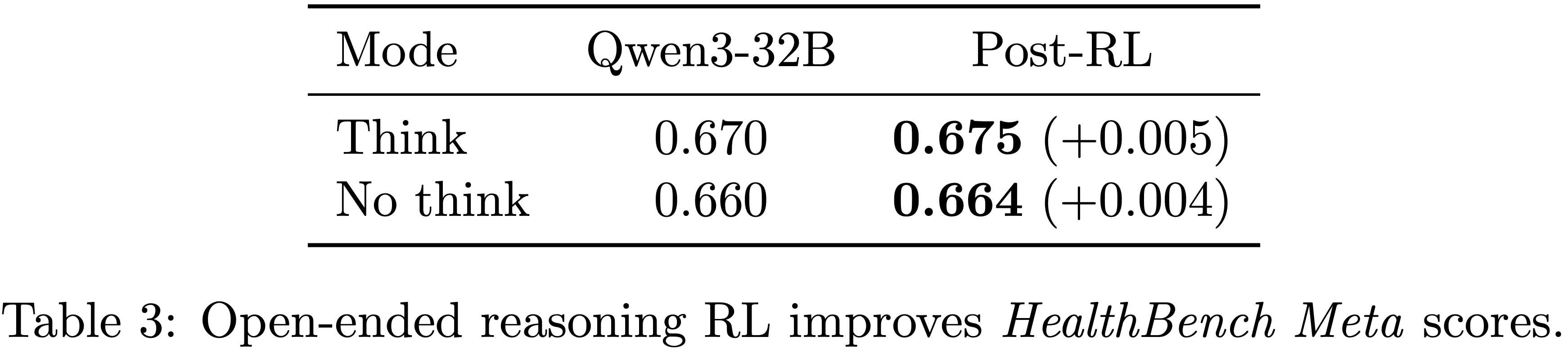
- 表 3 中展示了实验结果
- 性能在 Self-reflection 训练后确实保持稳定
- 在大多数情况下,与基础模型相比,性能下降不到 1%,甚至有些模型表现更好
- 例如,Qwen-2.5-1.5B 在 MMLU-Pro 和 MATH 上的表现分别提升了 0.6% 和 0.8%
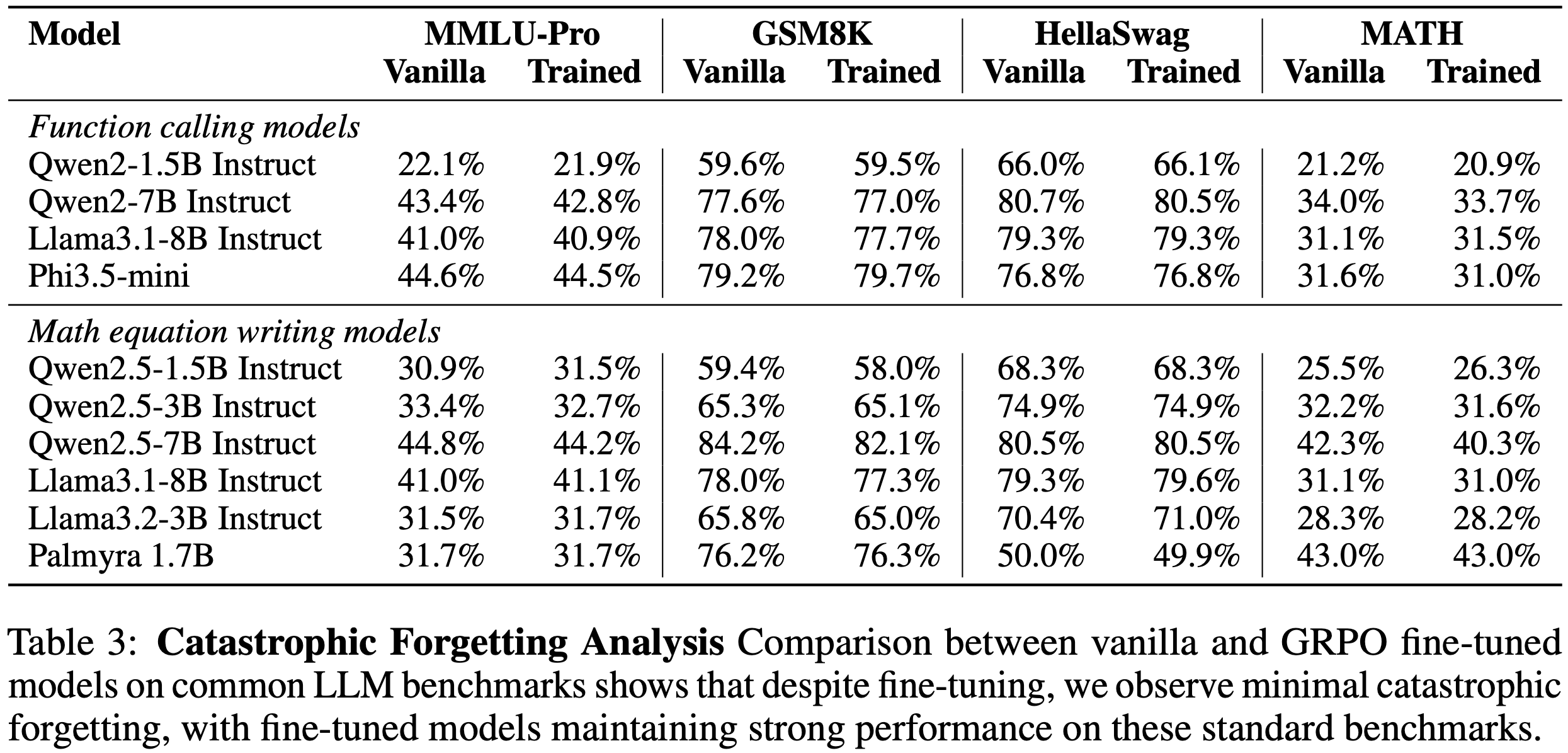
- 基于以上实验结果,作者认为论文的方法对灾难性遗忘具有鲁棒性
Limitations
- 并非所有任务都能轻松定义二元成功/失败验证器
- 论文开发这一方法时假设标注训练数据可能稀缺,但也认识到如果有可用的真实标签,可以将其用作验证器
- 也可以使用更大的模型作为评判者(2023)
- 论文还发现,论文的方法并非适用于所有模型和任务;模型必须具备执行任务、 Self-reflection 和学习的基本能力,才能通过提升自我修正能力发挥作用
- 例如,Llama3.2-3B Instruct 无法在函数调用任务上学会自我修正
附录 A Prompt Templates
- 为便于复现和清晰理解,论文提供了训练期间使用的提示模板细节
- 论文尽可能遵循模型提供方的推荐提示方式,并通过迭代优化确保每个模型在每项任务上达到合理的基线表现
A.1 Function Calling
- Qwen 2 系列模型 对于 Qwen 2 系列模型的函数调用任务,论文采用以下提示风格
- 首先,提供系统提示:
你是一个能够回答问题并协助完成任务的助手
\# 工具
你可以调用一个或多个函数来协助完成用户查询函数签名位于
<tools></tools>XML 标签内:<tools>
{工具列表,每行一个工具}</tools>对于每个函数调用,返回一个包含函数名称和参数的 JSON 对象,并将其放在
<tool_call></tool_call>XML 标签内:<tool_call>
{"name": <函数名称>, "arguments": <参数 JSON 对象>}</tool_call> - 随后,以用户角色提供数据集中的查询。模型会生成首次任务尝试。如果尝试失败,则提示生成 Self-reflection :
你尝试完成任务,但未能生成正确的工具调用。请反思问题所在,并写一段简短的说明以帮助下次改进
- 生成 Self-reflection 后,再次提供系统提示和用户查询,为模型的第二次尝试做准备
- 首先,提供系统提示:
- Llama 3.1 和 Phi 3.5 模型
- 论文遵循 Llama 3.1 推荐的工具调用格式。Phi 模型使用 Llama 模板效果更佳。系统提示如下:
当你收到工具调用响应时,请使用输出内容回答原始用户问题
你是一个具备工具调用能力的助手
以用户角色提供工具和查询:
根据以下函数,请以 JSON 格式返回一个函数调用及其参数,以最佳方式回答给定提示响应格式为 {"name": 函数名称, "parameters": 参数字典}。不要使用变量
{工具列表,每行一个工具}
问题:{用户查询} - 模型生成首次尝试后,提示 Self-reflection :
你尝试完成任务,但未能生成正确的工具调用。请反思问题所在,并写一段简短的说明以帮助下次改进
- 随后仅提供用户查询,为第二次尝试做准备
- 论文遵循 Llama 3.1 推荐的工具调用格式。Phi 模型使用 Llama 模板效果更佳。系统提示如下:
A.2 ountdown Math Equations
- 系统提示如下:
请逐步推理,并将最终答案放在 \(\boxed{}\) 中
- 用户提示为:
使用数字 {数字列表} 创建一个等于 {目标值} 的方程。你可以使用基本算术运算(+、-、*、/),且每个数字只能使用一次。请逐步推理,并将最终答案放在 \(\boxed{}\) 中
- 模型生成首次尝试后,若失败则提示 Self-reflection :
你尝试解决问题但得到了错误答案。请反思问题所在,并写一段简短的说明以帮助下次改进
- 生成 Self-reflection 后,重复用户提示,为第二次尝试做准备
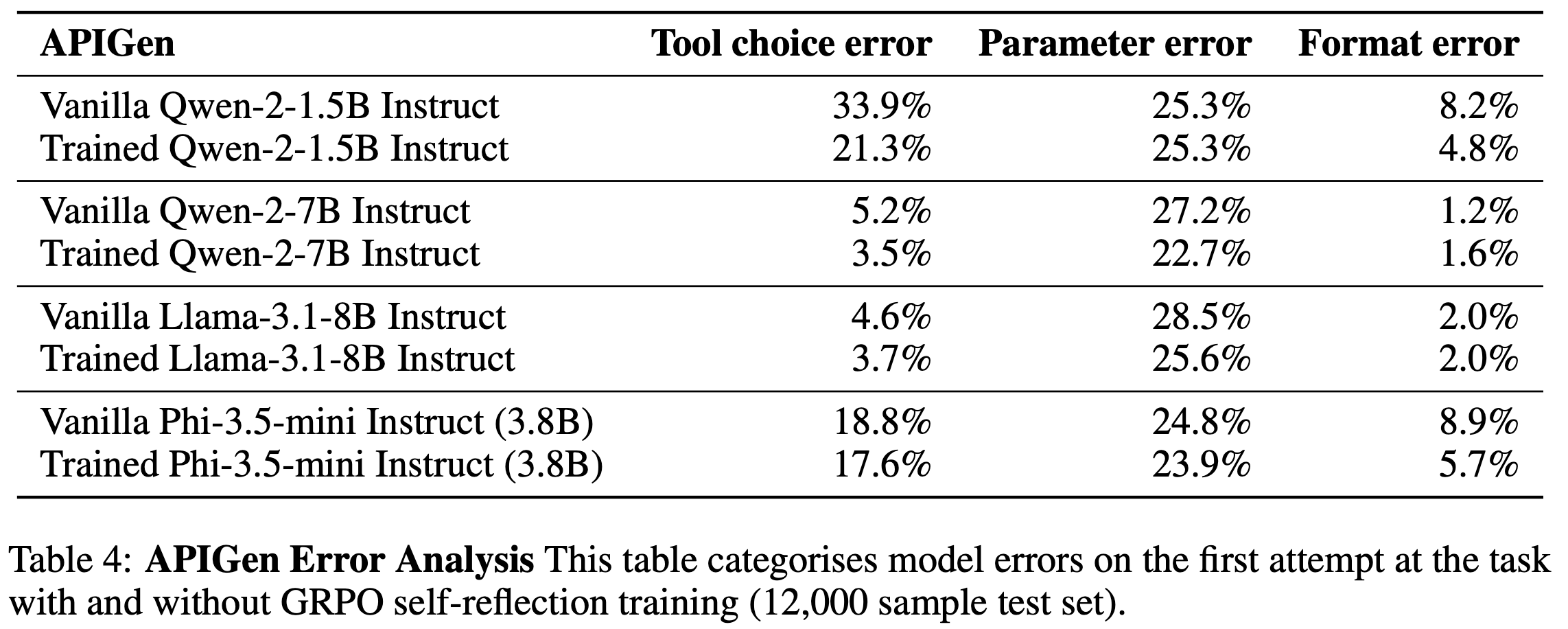
附录 B Error Analysis
- 论文对训练前后模型的错误进行分类,以更好地理解模型在这些任务中容易犯的错误类型,以及哪些错误可以通过 Self-reflection 训练缓解
- 论文仅分析首次尝试任务时的错误(pass@1)
B.1 Function Calling
- 将错误分为三类:工具选择错误、参数名称或值错误、格式错误
- 参数选择比工具选择更具挑战性
- 小模型(如 Qwen-2-1.5B Instruct 和 Phi-3.5-mini Instruct) :未经训练时在工具选择上表现较差,训练后对参数值的改进有限
- 大模型(7-80 亿参数) :未经训练时工具选择已较准确,训练主要提升参数选择能力
B.2 Math Countdown Equations
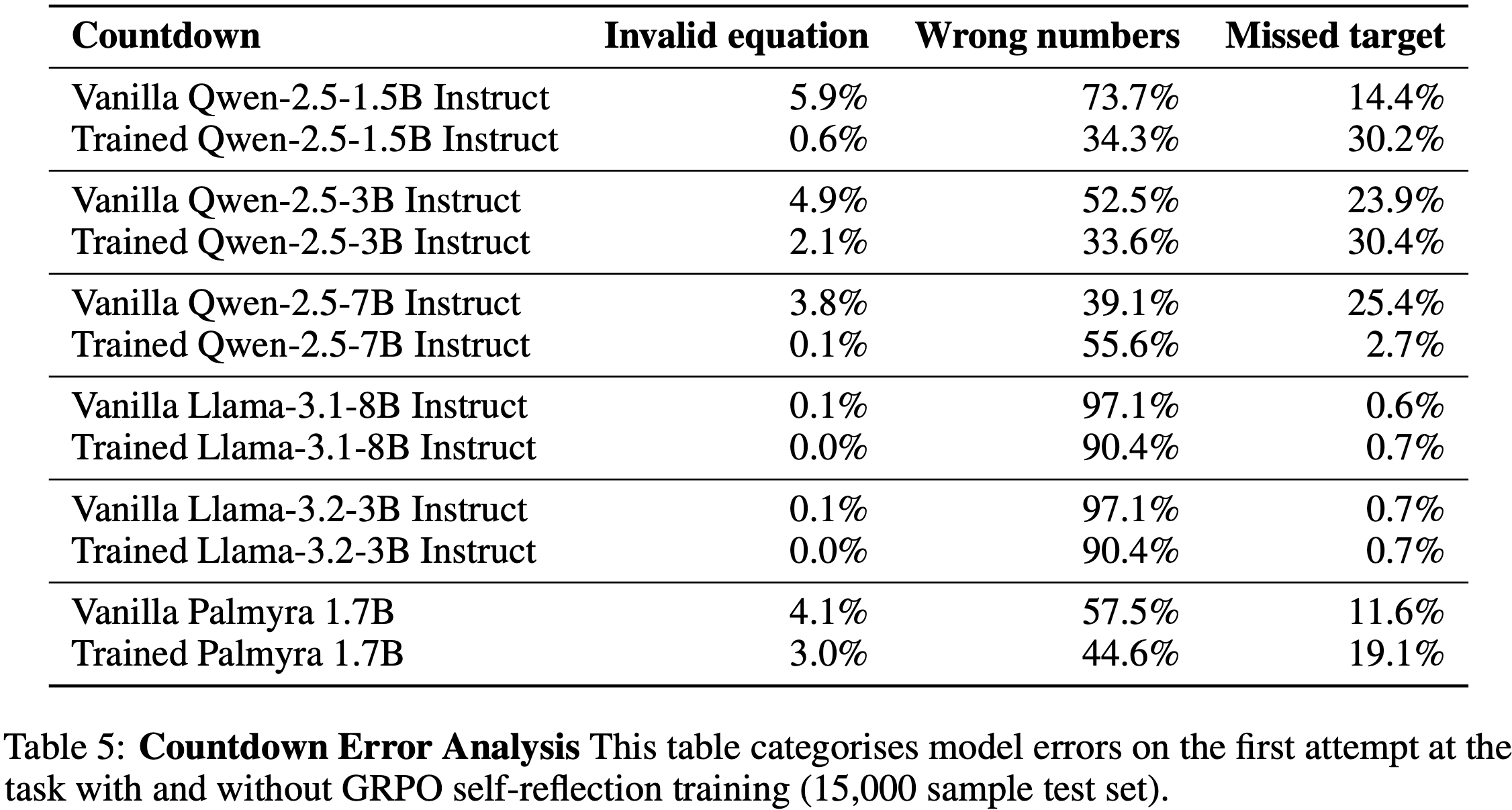
- 将错误分为三类:无效方程(含非法字符)、使用非提供数字(错误数字)、方程结果未达目标值(未命中目标)
- 所有模型 :主要问题集中在未能仅使用允许的数字
- 训练显著减少了此类错误(除 Qwen-2.5-7B Instruct 外)
- Qwen-2.5-7B Instruct :训练后更倾向于命中目标值,即使使用了错误数字