本文介绍了MSRA今年的一篇文章: UNILM: Unified Language Model Pre-training for Natural Language Understanding and Generation
UNILM 基于三个预训练目标
- Unidirectional LM:
- Bidirectional LM:
- Sequence2Sequence LM:
贡献
和 BERT 对比
- BERT 是双向模型,所以自然语言的生成(NLG)任务上不适用
- UNILM 采用三种(无监督的)LM目标,其中的 Sequence2Sequence LM 能够解决文本生成问题
其他一些优点
- 仅使用一个 LM (由 Transformer 构成), 在三个不同的预训练任务上共享参数, 泛化能力强
- 参数共享: 不需要在不同的语言模型(对应不同的预训练任务)上使用不同的模型参数
- 泛化能力强: 多个训练目标同时优化模型,使得模型能够避开因为训练目标引起的过拟合问题
模型结构介绍
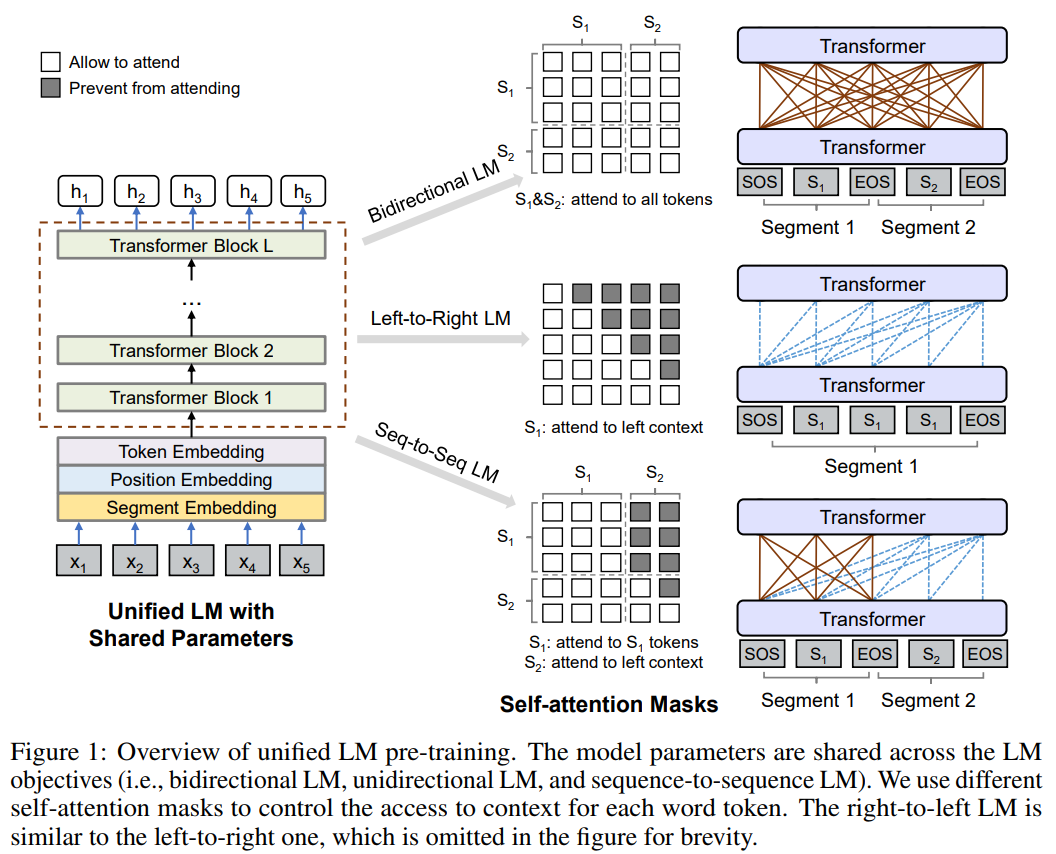
结构图
- 输入向量为 \(\vec{x} = (x_1, x_2,,,x_{|x|}\))
- 输入向量表征与 BERT 相同,由 Embedding 层(三个 Embedding 层之和, 和 BERT 一样):
- Token Embedding,WordPiece
- Position Embedding
- Segment Embedding,由于 UNILM 会使用多个 LM 任务训练,所以 Segment Embedding 在模型中也扮演着 LM 标识的作用(对不同的 LM 目标使用不同的Segment Embeddings)
- 主要网络(Backbone Network)为多层Transformer:
- 每两个Transformer Blocks之间的Self-Attention Masks: For Each Transformer Block, 使用多头 Self-Attention 来聚合之前层出现的输入向量.(这里的 Self-Attention 使用了)
- Transformer 之间的 Self-Attention 机制决定了模型什么语言模型(任务)
- 如图所示:
- Bidirectional LM 对应的 Self-Attention Masks 为全0的矩阵,表示所有的 Attention 都不屏蔽 (attend to all tokens)
- Left-to-Right LM 对应的 Self-Attention Masks 为拼屏蔽右上三角的矩阵(左下三角全为0)
- Right-to-Left LM 对应的 Self-Attention Masks 为拼屏蔽左下三角的矩阵(右上三角全为0)
- Seq-to-Seq LM 对应的 Self-Attention 为
- \(S_1\) - \(S_1\) 为全0(0表示开放), 对应为Bidirectional
- \(S_1\) - \(S_2\) 为负无穷(负无穷表示屏蔽)
- \(S_2\) - \(S_1\) 为全0
- \(S_2\) - \(S_2\) 为屏蔽右上三角的矩阵(这里与Left-to-Right的情况相同)
按照结构图分析数据流
- 对于一组输入向量 \(\{\vec{x}\}_{i=1}^{|x|} \),初始编码为 \(\mathbf{H}^0 = [\vec{x}_1, \vec{x}_2,,,\vec{x}_{|\vec{x}|}]\)
- 第一层后编码为上下文表征 \(\mathbf{H}^1 = [\vec{h}_1^1, \vec{h}_2^1,,,\vec{h}_{|\vec{x}|}^1]\)
- 第 \(l\) 层后编码为上下文表征 \(\mathbf{H}^l = [\vec{h}_1^l, \vec{h}_2^l,,,\vec{h}_{|\vec{x}|}^l]\)
- 每一层的 Transformer Block, 使用 multiple self-attention heads去聚合上一层的输出: L-layer的 Transformer对应的数学表达式为 \(\mathbf{H}^l = Transformer_l(\mathbf{H}^{l-1}), l \in [1, L]\)
- Self-Attention Head \(\mathbf{A}_l\) 的详细计算公式如下:
$$
\begin{align}
\mathbf{H} = \mathbf{H}^{l-1}\mathbf{W}_l^Q \\
\mathbf{K} = \mathbf{H}^{l-1}\mathbf{W}_l^K \\
\mathbf{V} = \mathbf{H}^{l-1}\mathbf{W}_l^V \\
\mathbf{A} = softmax(\frac{\mathbf{Q}\mathbf{K}^T}{\sqrt{d_k}} + \mathbf{M})\mathbf{V}_l \\
where, \quad \mathbf{M}_{ij} = 0 \ or \ -\infty
\end{align}
$$- \(\mathbf{M}\) 中的值
- \(-\infty\) 表示屏蔽Attention (prevent from Attention)
- 0 表示允许 Attention (allow to Attention)
- \(\mathbf{M}\) 中的值