本文是对POMDP这个不常见的概念的一些简单介绍,主要内容参考自POMDP讲解
- 参考链接:POMDP讲解
MDP 和 POMDP
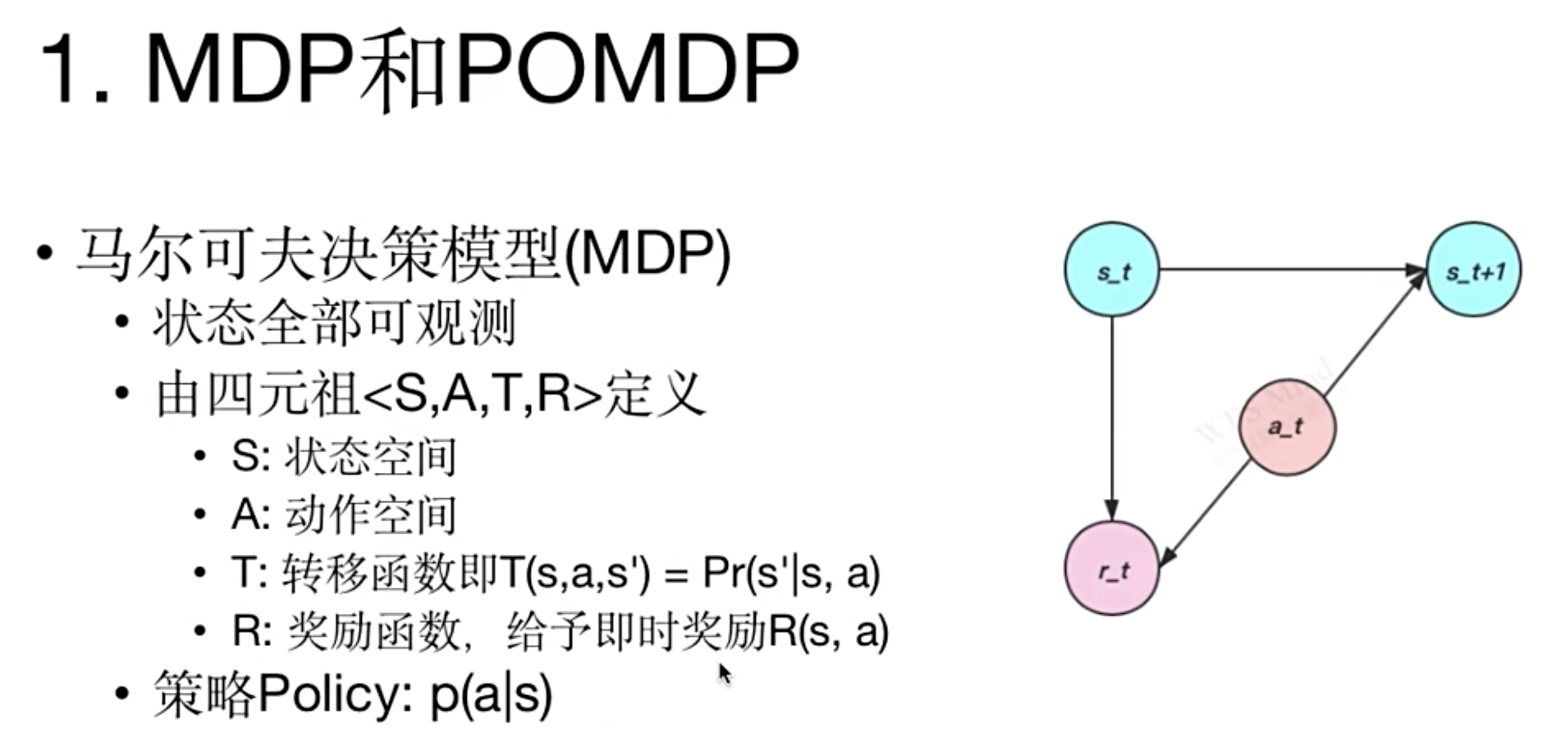
- 马尔可夫决策模型(MDP)
- 状态全部可观测
- 由四元祖 \(\langle S, A, T, R\rangle\) 定义:
- \(S\):状态空间
- \(A\):动作空间
- \(T\):转移函数即 \(T(s, a, s’) = Pr(s’|s, a)\)
- \(R\):奖励函数,给予即时奖励 \(R(s, a)\)
- 策略Policy: \(p(a|s)\)
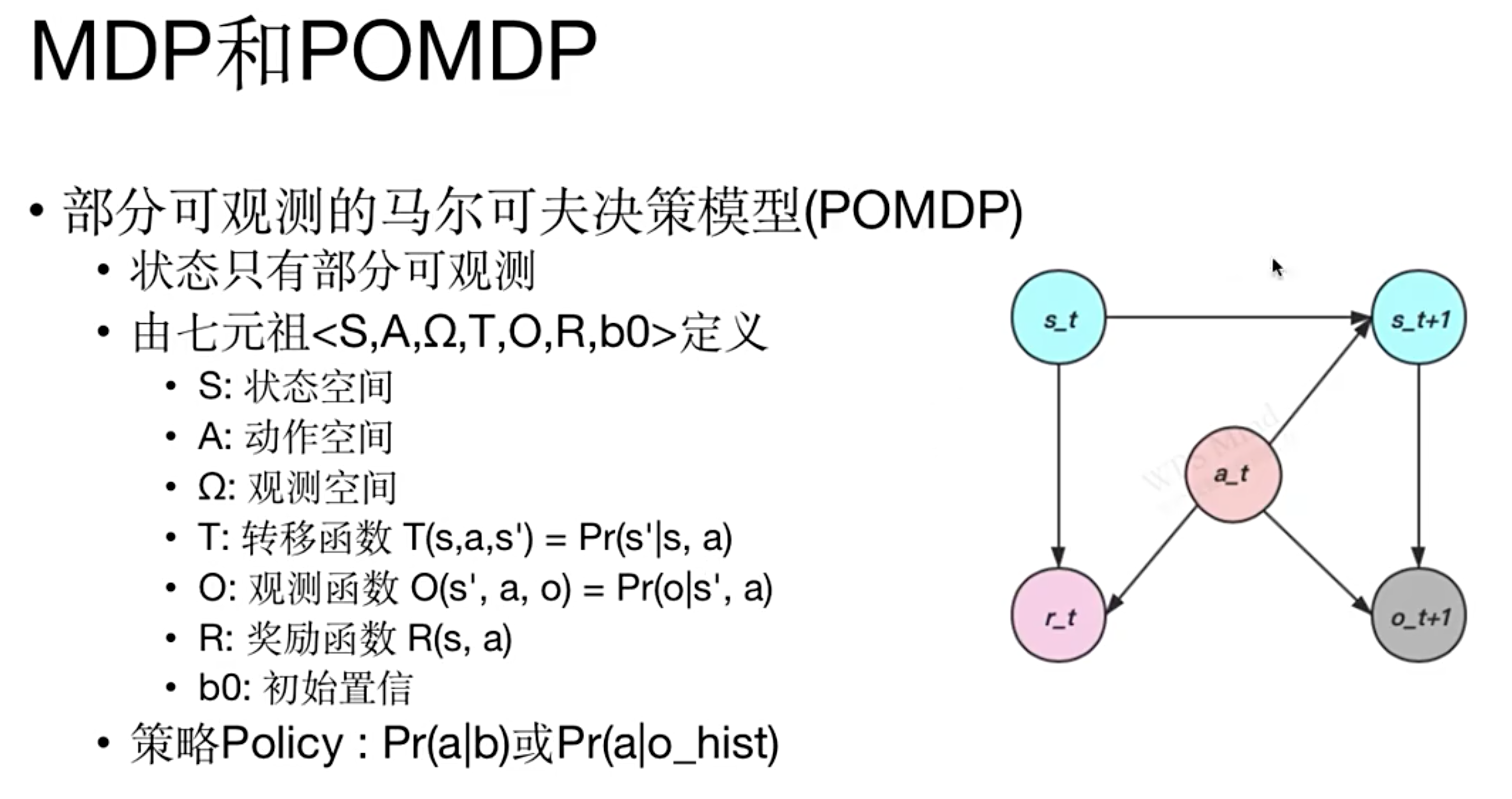
- 部分可观测的马尔可夫决策模型(POMDP)
- 状态只有部分可观测
- 由七元祖 \(\langle S, A, \Omega, T, O, R, b0\rangle\) 定义:
- \(S\):状态空间
- \(A\):动作空间
- \(\Omega\):观测空间
- \(T\):转移函数 \(T(s, a, s’) = Pr(s’|s, a)\)
- \(O\):观测函数 \(O(s’, a, o) = Pr(o|s’, a)\)
- \(R\):奖励函数 \(R(s, a)\)
- \(b0\):初始置信
- 策略Policy: \(Pr(a|b)\) 或 \(Pr(a|o_{hist})\) ,其中 \(o_{hist}\) 表示单帧或多帧的历史观测信息(因为观测 \(o\) 是不分更新的,可能已经不满足马尔科夫性了)
- POMDP 的观测本身是不完整的系统状态信息,可能已经不满足马尔科夫性了,此时可以通过信念状态(Belief State,写作 \(b\))或历史观测序列(写作 \(o_{hist}\))来表示当前状态,从而保证智能体看到的观测是尽量完整的
POMDP 中的置信 Belief
- Belief 的定义 :Belief是智能体对于当前环境的状态分布估计
- 使用 Belief 的原因 :因为Belief是充分统计量,也就是说做决策时只需要当前的Belief而不需要其他信息,另外观测历史也是充分统计量。在构建充分统计量后,可以将Belief理解为和MDP里的状态等价的概念,只是Belief是连续的
- 使用方式 :当前置信 \(b\) 情况下,在执行动作 \(a\) 和得到观测 \(o\) 后,需要更新置信为 \(b’\)
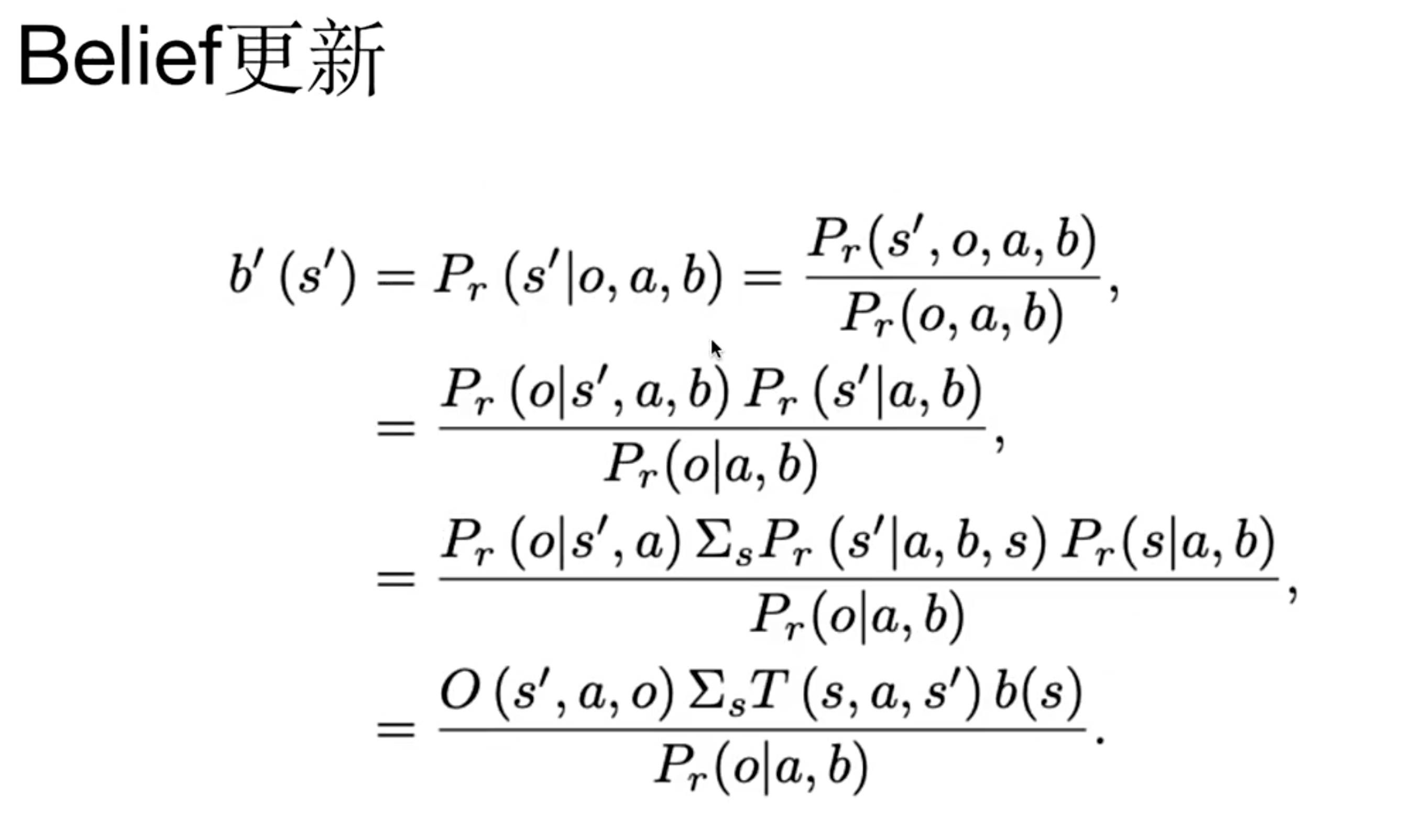
- Belief 更新公式 :
$$
\begin{align}
b’(s’) &= P_r(s’|o, a, b) = \frac{P_r(s’, o, a, b)}{P_r(o, a, b)}\\
&= \frac{P_r(o|s’, a, b)P_r(s’|a, b)}{P_r(o|a, b)}\\
&= \frac{P_r(o|s’, a)\sum_s P_r(s’|a, b, s)P_r(s|a, b)}{P_r(o|a, b)}\\
&= \frac{O(s’, a, o)\sum_s T(s, a, s’)b(s)}{P_r(o|a, b)}
\end{align}
$$
MDP 和 POMDP 的优化目标
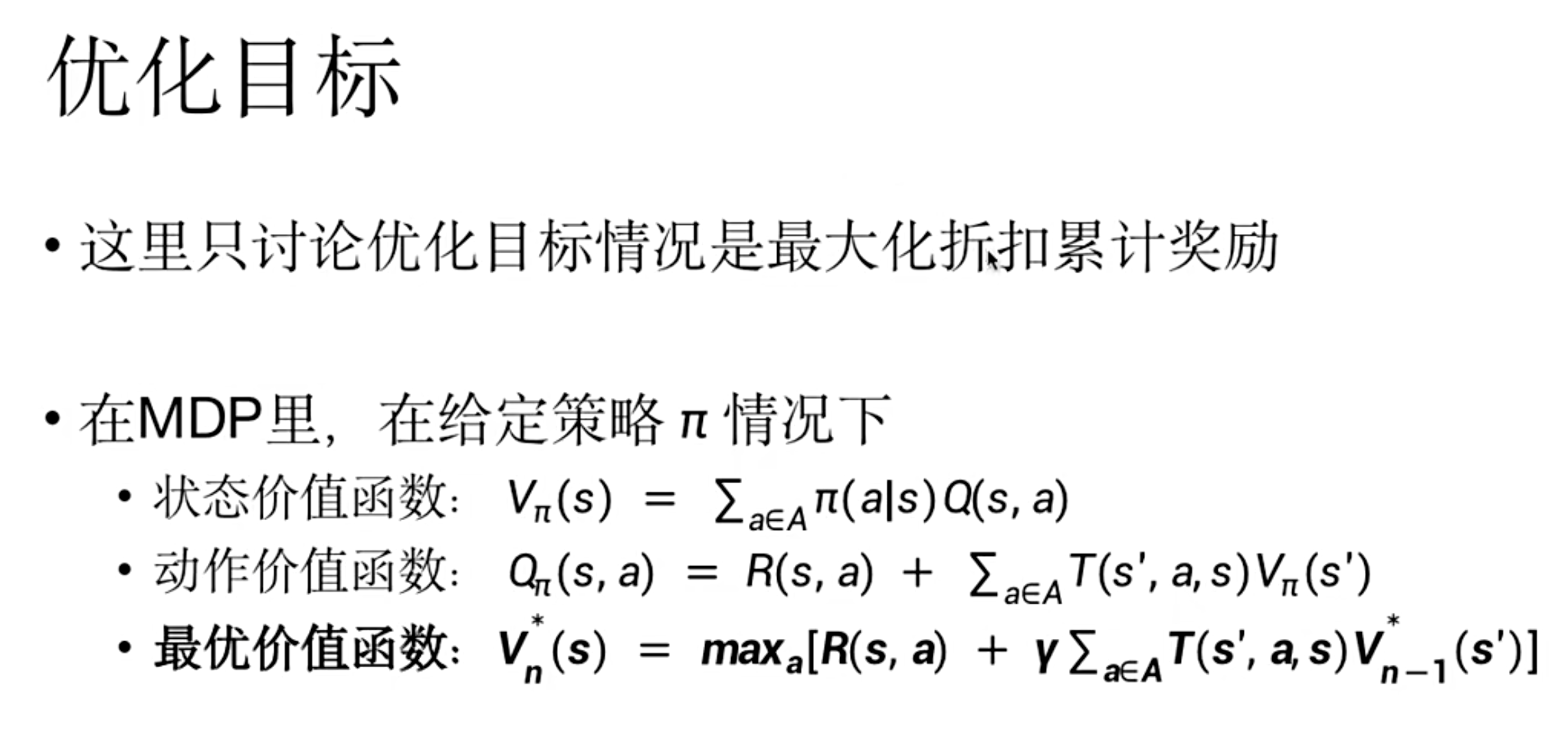
- 在 MDP 里 :在给定策略 \(\pi\) 情况下
- 状态价值函数: \(V_{\pi}(s) = \sum_{a\in A}\pi(a|s)Q(s, a)\)
- 动作价值函数: \(Q_{\pi}(s, a) = R(s, a) + \sum_{a\in A}T(s’, a, s)V_{\pi}(s’)\)
- 最优价值函数: \(V_{n}^{*}(s) = \max_{a}[R(s, a) + \gamma\sum_{a\in A}T(s’, a, s)V_{n - 1}^{*}(s’)]\)
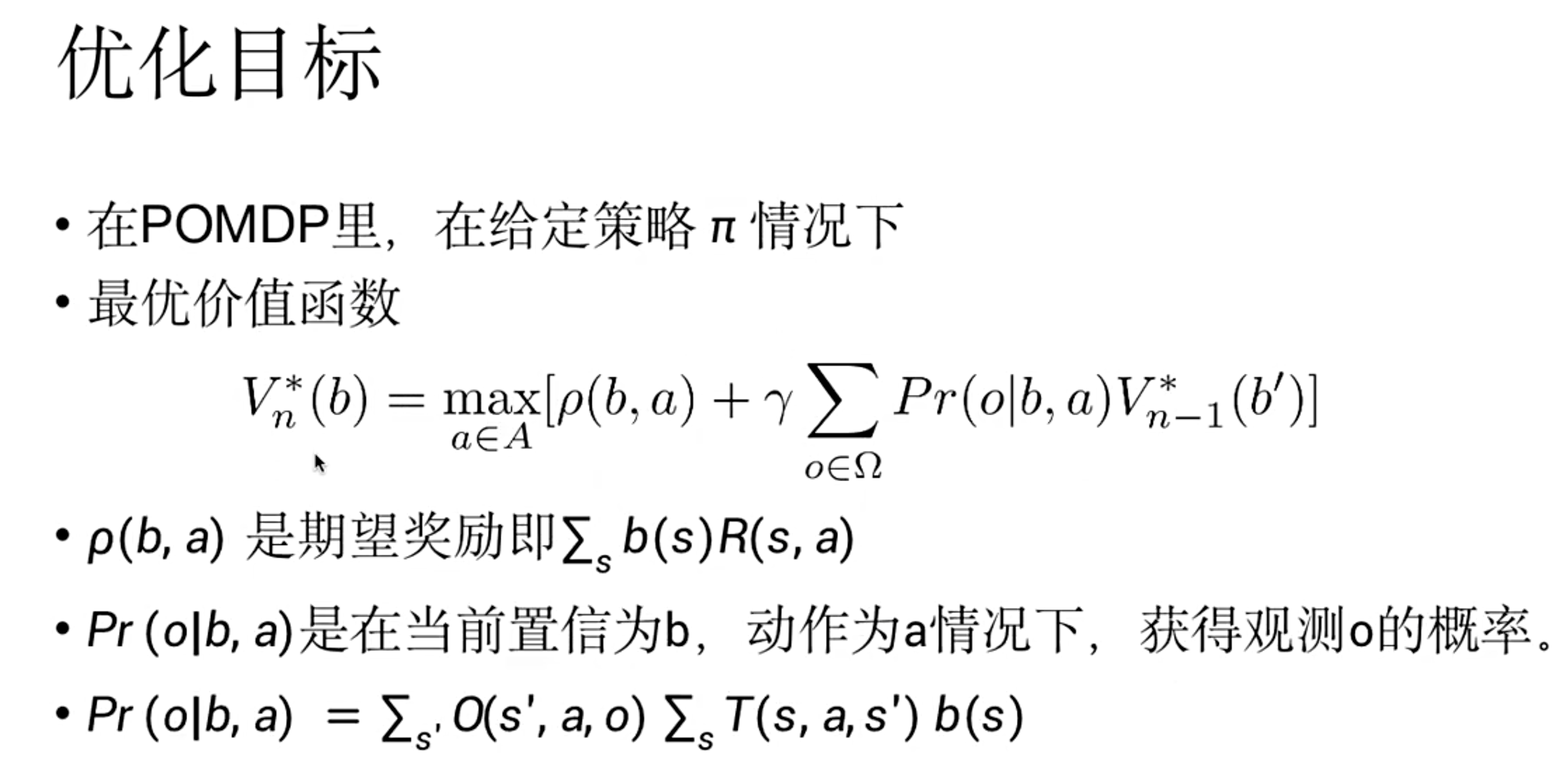
- 在 POMDP 里 :在给定策略 \(\pi\) 情况下
- 最优价值函数:
$$
V_{n}^{*}(b) = \max_{a\in A}[\rho(b, a) + \gamma\sum_{o\in\Omega}Pr(o|b, a)V_{n - 1}^{*}(b’)]
$$ - 其中 \(\rho(b, a)\) 是期望奖励即 \(\sum_{s}b(s)R(s, a)\)
- \(Pr(o|b, a)\) 是在当前置信为 \(b\) ,动作为 \(a\) 情况下,获得观测 \(o\) 的概率,且 \(Pr(o|b, a) = \sum_{s’}O(s’, a, o)\sum_{s}T(s, a, s’)b(s)\)
- 最优价值函数:
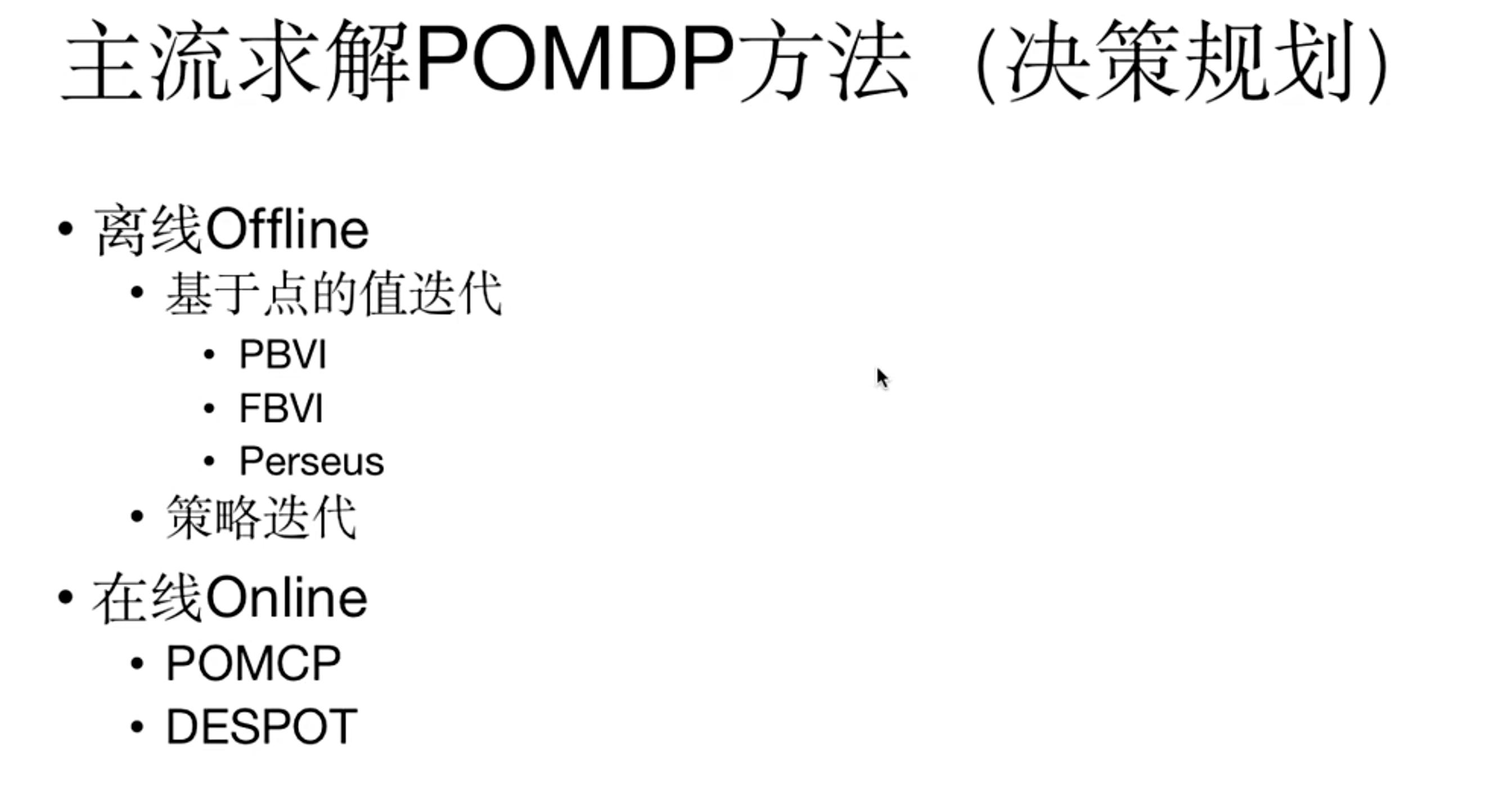
主流求解 POMDP 方法(决策规划)
- 离线(Offline)
- 基于点的值迭代 :PBVI、FBVI、Perseus
- 策略迭代
- 在线(Online) :POMCP、DESPOT
POMDP 于 RL
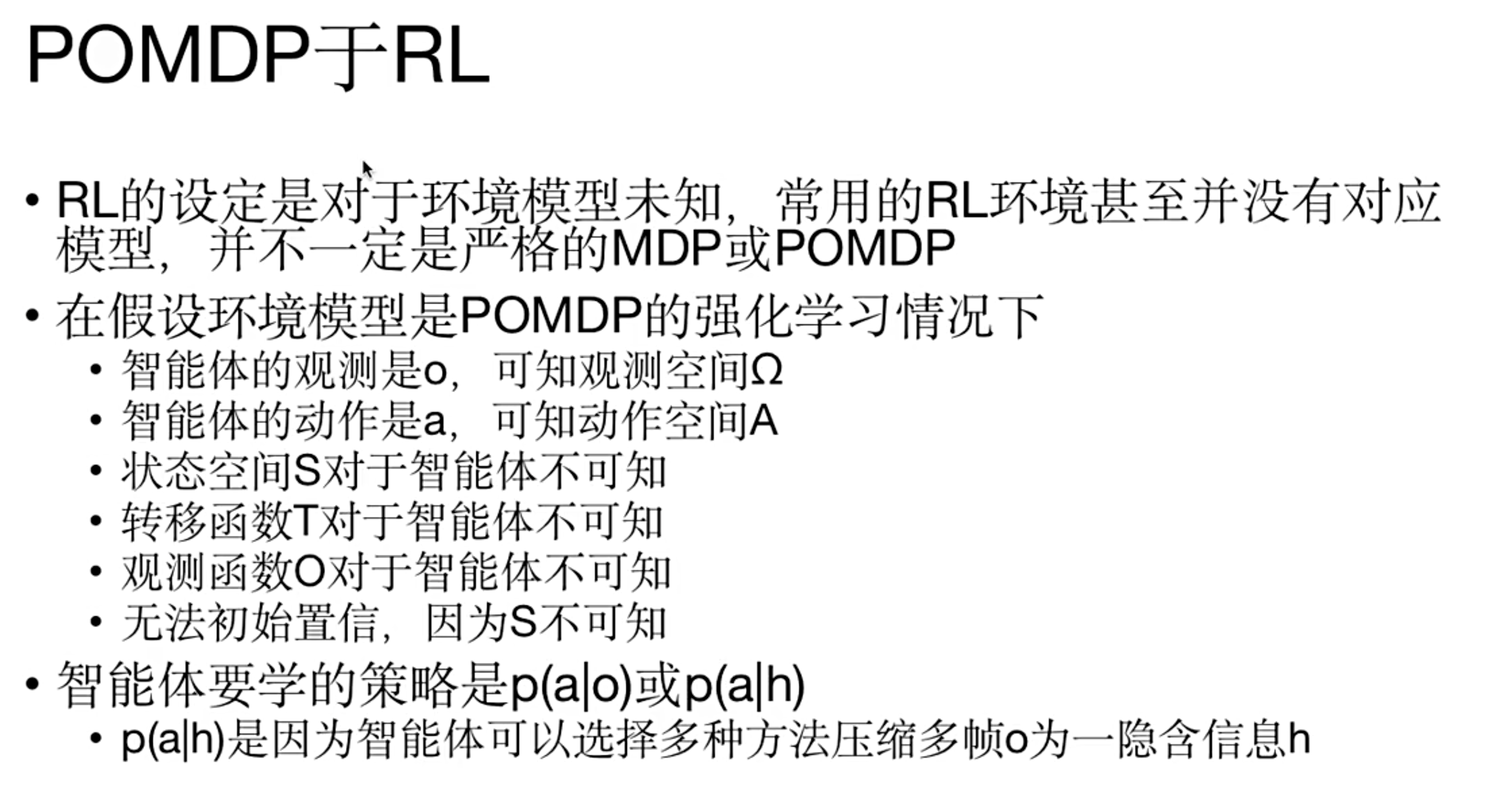
- RL的设定是对于环境模型未知,常用的RL环境甚至并没有对应模型,并不一定是严格的MDP或POMDP
- 在假设环境模型是POMDP的强化学习情况下:
- 智能体的观测是 \(o\) ,可知观测空间 \(\Omega\)
- 智能体的动作是 \(a\) ,可知动作空间 \(A\)
- 状态空间 \(S\) 对于智能体不可知
- 转移函数 \(T\) 对于智能体不可知
- 观测函数 \(O\) 对于智能体不可知
- 无法初始置信,因为 \(S\) 不可知
- 智能体要学的策略是 \(p(a|o)\) 或 \(p(a|h)\) , \(p(a|h)\) 是因为智能体可以选择多种方法压缩多帧 \(o\) 为一隐含信息 \(h\) 。
- 传统的RL算法本身并不假设知道状态转移矩阵等,所以其实常见的RL算法可以直接用于求解POMDP,只是如果观测到的信息太少,RL不一定能保证收敛(观测不是环境的完整描述,可能不满足马尔可夫性,基于贝尔曼方程迭代的价值函数可能难以收敛)
- 比如策略梯度法推导过程中始终考虑的是期望收益,并不要求完整观测到环境,所以策略梯度法理论上适用于解决POMDP问题,但是观测不是环境的完整描述,可能不满足马尔可夫性,使用策略梯度法时最好使用REINFORCE方法,不使用Critic网络
附录:一些 PPT 原始介绍
- 以下PPT内容来自:POMDP讲解
MDP
- MDP的介绍
- 对于确定决策,策略的概率值为1即可
POMDP
- POMDP的介绍
POMDP 的求解方案
- POMDP的解决方案介绍