Decision-Diffuser
- 参考链接:
- 原始论文:Is Conditional Generative Modeling all you need for Decision-Making?, MIT, ICLR 2023
- 源码:github.com/anuragajay/decision-diffuser
- 官方博客:anuragajay.github.io/decision-diffuser
- 参考链接:Diffusion Model + RL 系列技术科普博客(2):Decision Diffuser - DILab决策实验室的文章 - 知乎
- Classifier-Free Diffusion Guidance, Google Research, Brain team, 2022,Classifier-Free Guidance方法
核心贡献点总结(对比 Diffuser)
- 序列组织方式 :
- Diffuser的序列包含了状态和动作
- Decision Diffuser的序列仅包含状态,不包含动作 ,这样做的原因是强化学习的状态往往是连续且平滑的,动作则往往是离散或结构化的,此外一些动作可能变化很高,很不平滑,Diffusion模型难以建模
- Guidance 方法 :
- Diffuser使用Classifier Guidance的方法
- Decision Diffuser采用Classifier-free Guidance的方法
- 决策过程中的历史轨迹窗口 :
- Diffuser使用历史长度为1的滑动窗口 ,在每个Diffusion采样时间步,每次仅保留单个历史状态 \(s_0\)
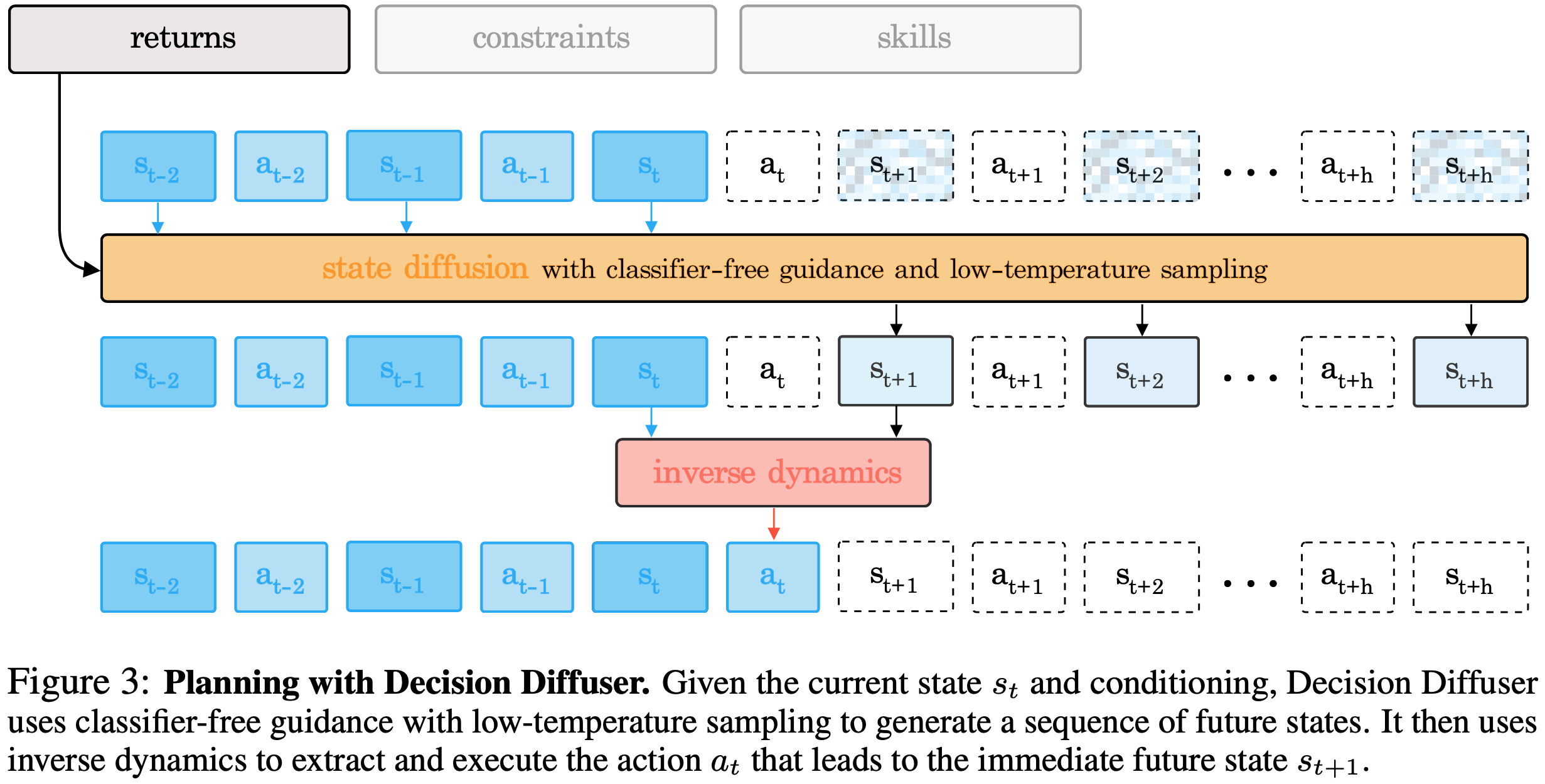
- Decision Diffuser使用历史长度为C的滑动窗口 ,在每个Diffusion采样时间步,Decision Diffuser将最近C个历史状态(实验中设置为C=20,planning horizon则根据不同的任务设置不同的值),直接赋值给当前的轨迹的前半部分,类似图片补全功能,保证生成后续的轨迹与当前轨迹一致
- 决策方式 :
- Diffuser直接按照轨迹生成的动作决策
- Decision Diffuser在轨迹中不直接生成动作,而是在生成轨迹中提取出 \(s_t,s_{t+1}\) 后,使用一个专门训练的策略网络 \(a_t:= f_\phi(s_t,s_{t+1})\) 来决策动作,网络也称为逆向动力学模型(Acting with Inverse-Dynamics),实际上,在其他文章,还可以是使用更多的状态来生成动作,比如AIGB中使用 \(a_t:= f_\phi(s_{t-L:t},s_{t+1})\)
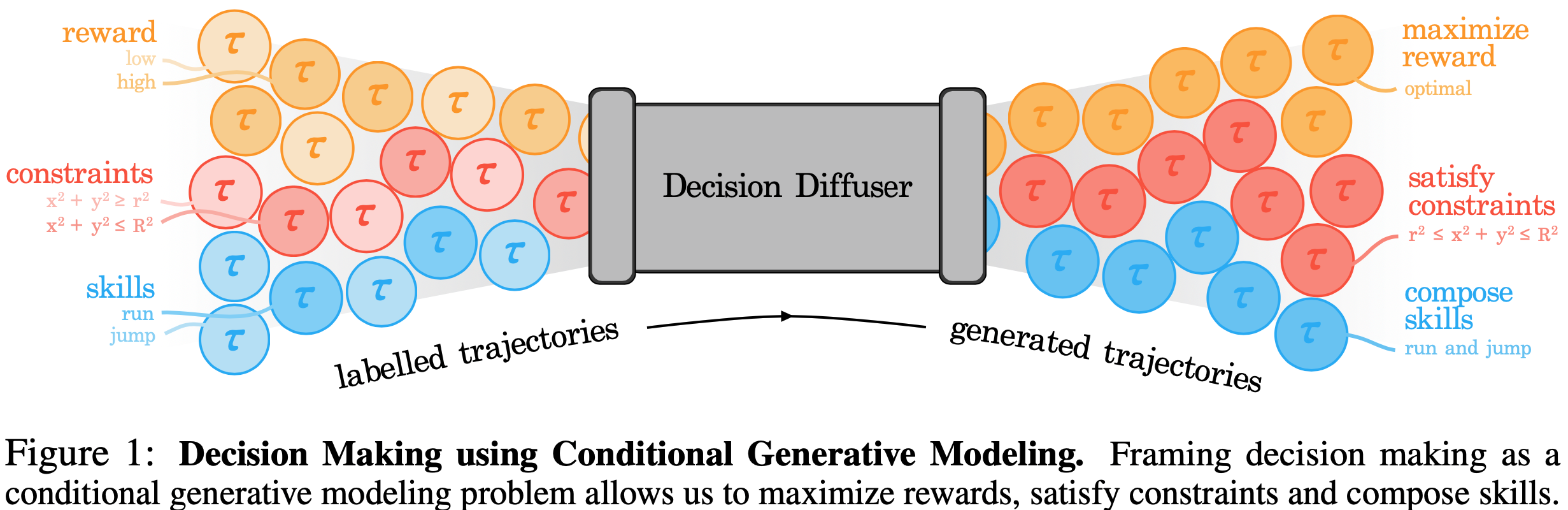
- 支持不同条件类型:最大化收益、约束满足和组合技能 :
- 最大化回报(Maximizing Returns) :\(\epsilon_\theta(\boldsymbol{x}_k(\tau), \boldsymbol{y}(\tau), k) := \epsilon_\theta(\boldsymbol{x}_k(\tau), R(\tau), k)\),其中 \(R(\tau) \in [0,1]\) 是经过归一化的奖励函数
- 约束满足(Satisfying Constraints) :Decision Diffuser条件满足的方式引入约束到网络输入端,具体来说,对于约束 \(\mathcal{C}_i\):\(\epsilon_\theta(\boldsymbol{x}_k(\tau), \boldsymbol{y}(\tau), k) := \epsilon_\theta(\boldsymbol{x}_k(\tau), \mathbb{I}(\tau \in \mathcal{C}_i), k)\),如果包含多个约束,可以使用one-hot向量来训练,满足约束的维度取1,其他维度取0来训练,虽然训练时只见过单约束,但是在采样时可以体现出多约束(one-hot向量变成多维度为1的向量)
- 组合技能(Skill Composition) :在生成轨迹时,Decision Diffuser可以通过不同Diffusion误差函数相加实现组合技能的采样形式,具体地,对于单一技能定义为:\(\epsilon_\theta(\boldsymbol{x}_k(\tau), \boldsymbol{y}(\tau), k) := \epsilon_\theta(\boldsymbol{x}_k(\tau), \mathbb{I}(\tau \in \mathcal{B}_i), k)\),采样时,多技能组合定义为:
$$\hat{\epsilon} := \epsilon_\theta(\boldsymbol{x}_k(\tau),\varnothing, k) + \omega \sum_{i=1}^n (\epsilon_\theta(\boldsymbol{x}_k(\tau),\boldsymbol{y}^i(\tau), k) - \epsilon_\theta(\boldsymbol{x}_k(\tau), \varnothing, k))$$- 详细推导见附录:多条件组合的证明
- 其他说明:Decision Diffuser支持约束的“与”运算和“非”运算(做减法),但是不支持或运算(Decision Diffuser 没有为每个条件变量提供显式的密度估计,因此它不能原生支持“或”运算组合)
- 其他:
- 低温采样 (Low-temperature Sampling):在常规的扩散模型采样方式中加入一个低温因子 \(\alpha\),即 \(\tau^{i-1} \sim \mathcal{N}(\tau^{i-1}|\mu_\theta(\tau^i, i), \color{red}{\alpha}\Sigma^i)\)
Decision Diffuser 具体实现
建模方式
- 整体思路概览:
- 序列组织方式如下:
- 约束同时达成情况示意图:
训练过程
- 训练过程
$$ \mathcal{L}(\theta, \phi) := \mathbb{E}_{k, \tau\in\mathcal{D}, \beta\sim\text{Bern}(p)}[||\epsilon - \epsilon_{\theta}(\boldsymbol{x}_{k}(\tau), (1-\beta)\boldsymbol{y}(\tau) + \beta\varnothing, k)||^{2}] + \mathbb{E}_{(s, a, s’) \in \mathcal{D}}[||a-f_{\phi}(s, s’)||^2] $$ - 两个网络相对独立,实际上写成两个损失函数分别训练也可以的
采样过程
- Decision Diffuser算法伪代码如下:
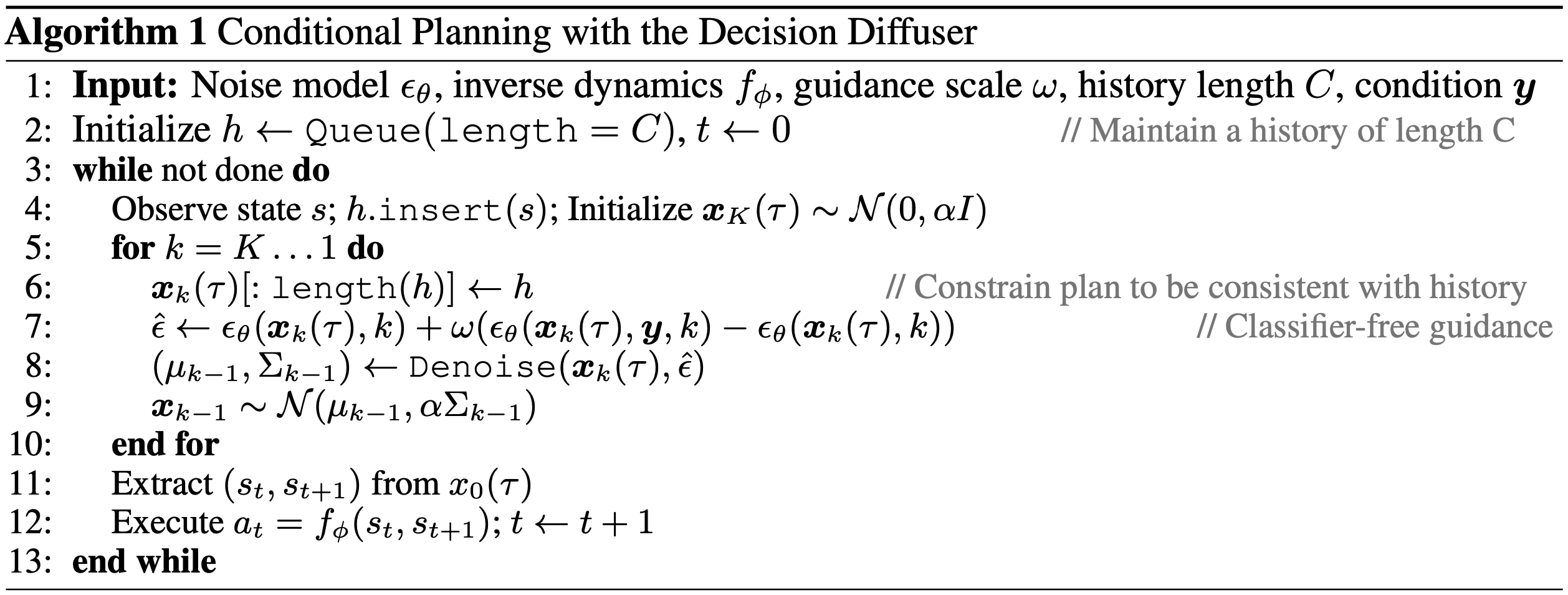
- 其中 \(\hat{\epsilon}\) 的定义与论文Classifier-Free Diffusion Guidance中的方法不同,但事实上通过调整Guidance scale的取值范围,可以得到两者表达式是等价的,详细讨论见附录:关于Guidance scale的讨论
Experiments
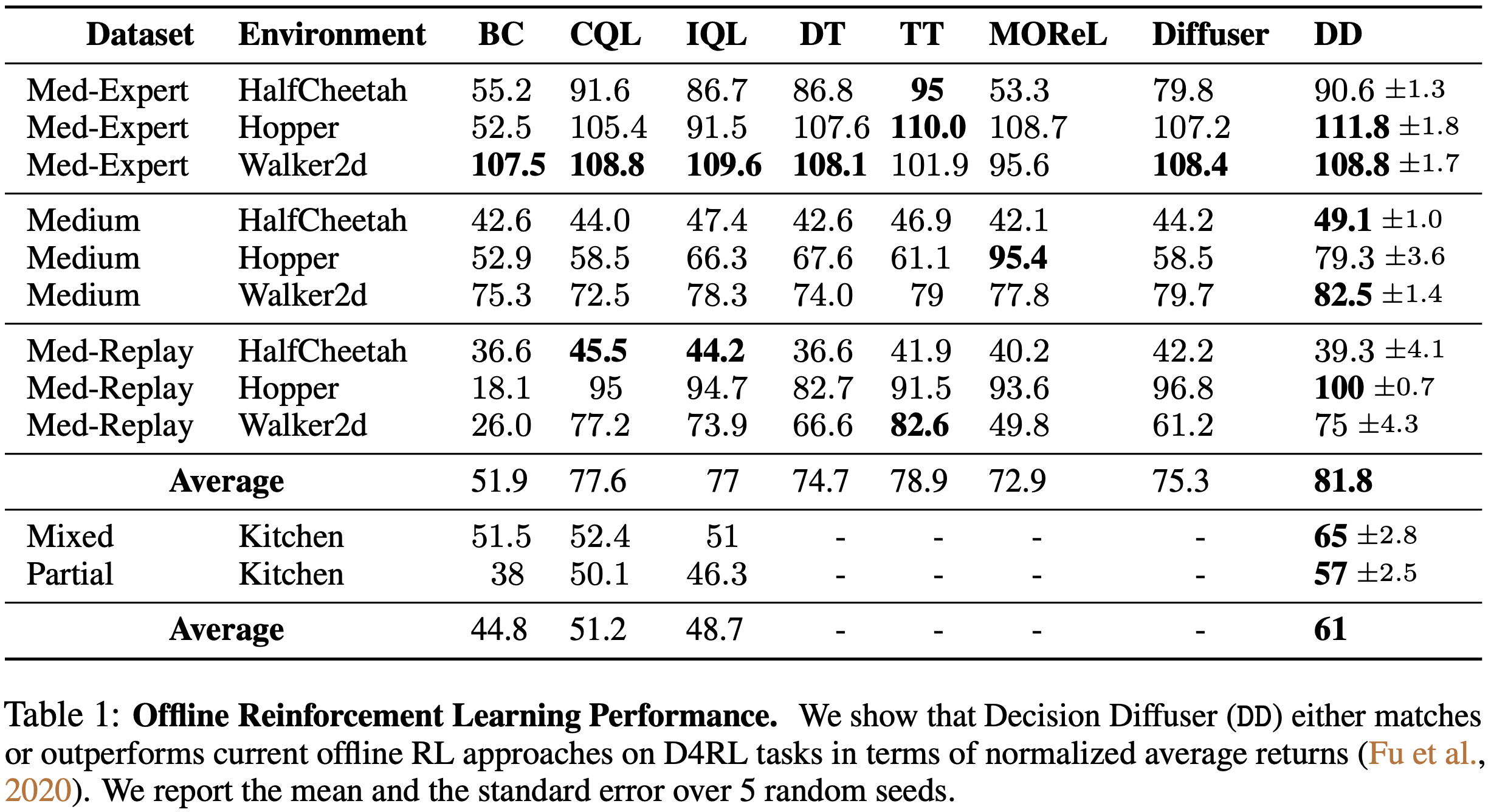
最大化回报(与强化学习方法对照)
- 实验结论:
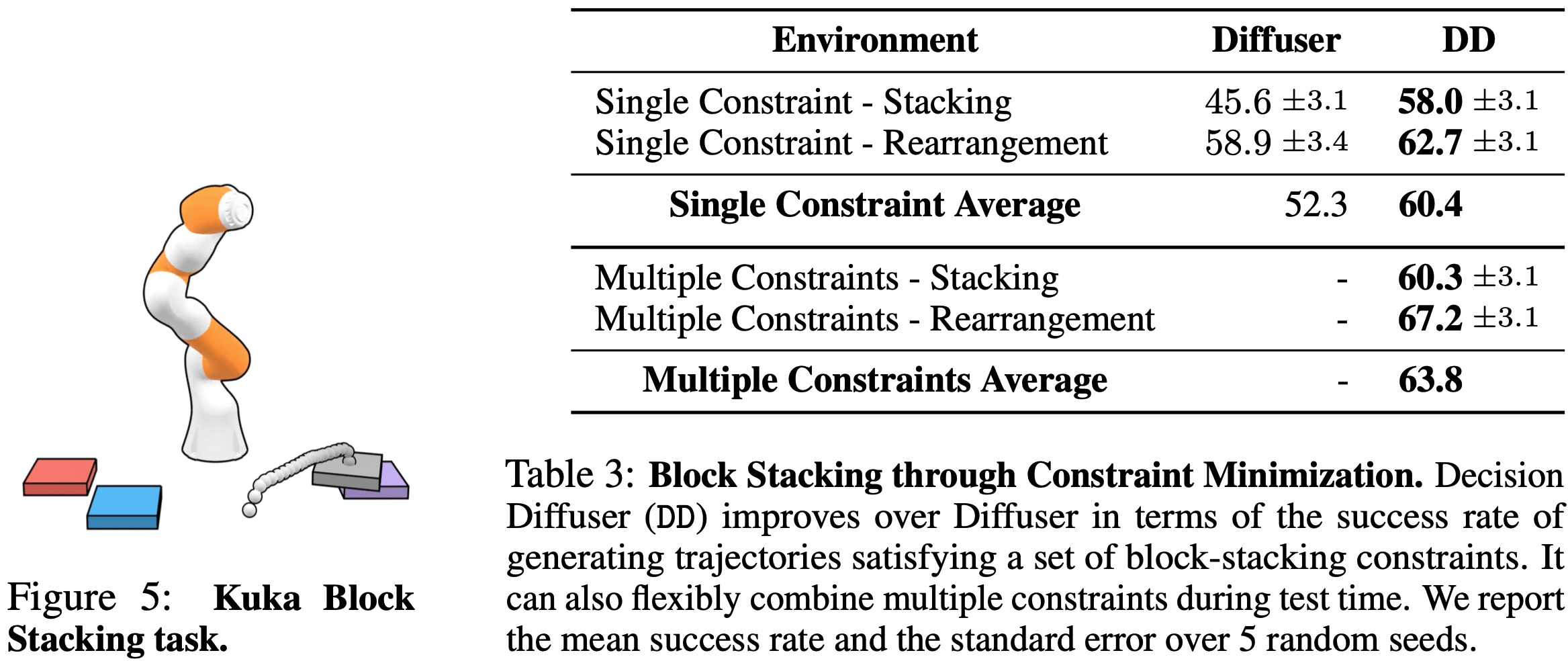
约束达成实验
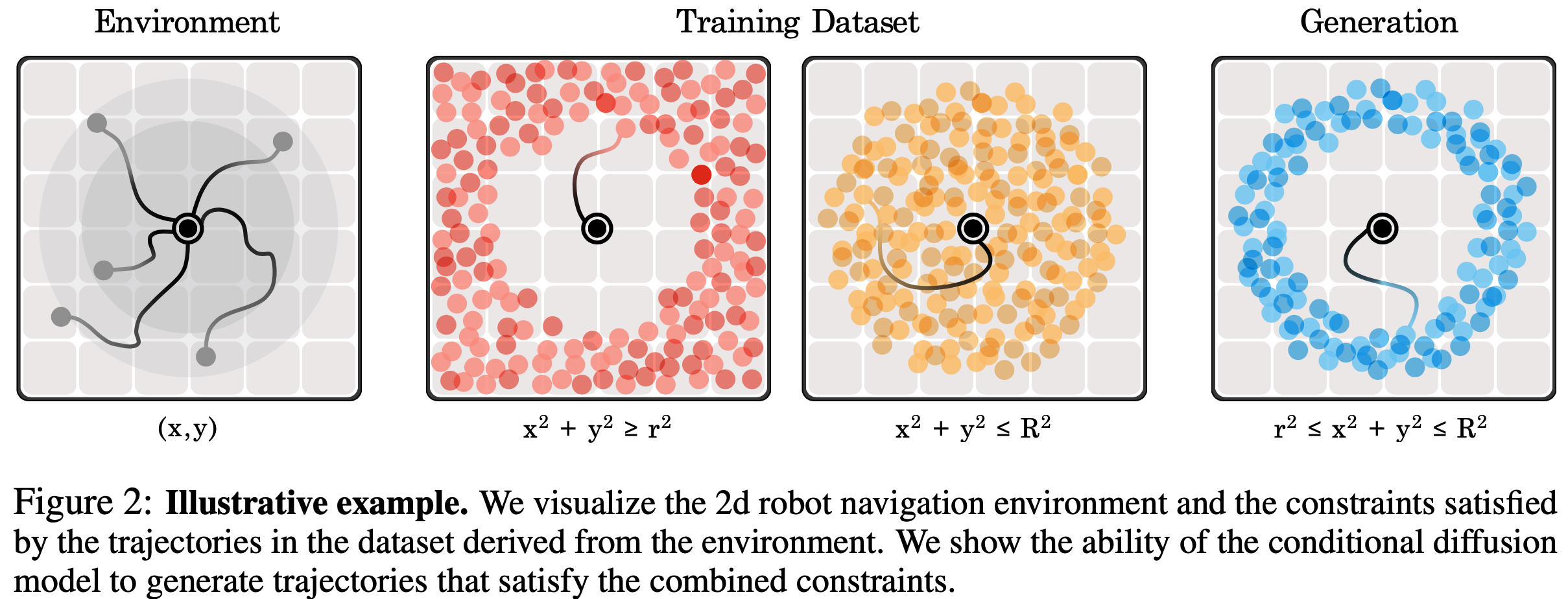
- 实验设置
- 背景:在环境中采样轨迹数据,每个轨迹满足一个约束
- 测试目标:
- Single Constraint:满足任意单一约束(数据集中存在的)
- Multiple Constraints:同时满足一些约束组合(这些组合是训练数据中没有的)
- 实验结论
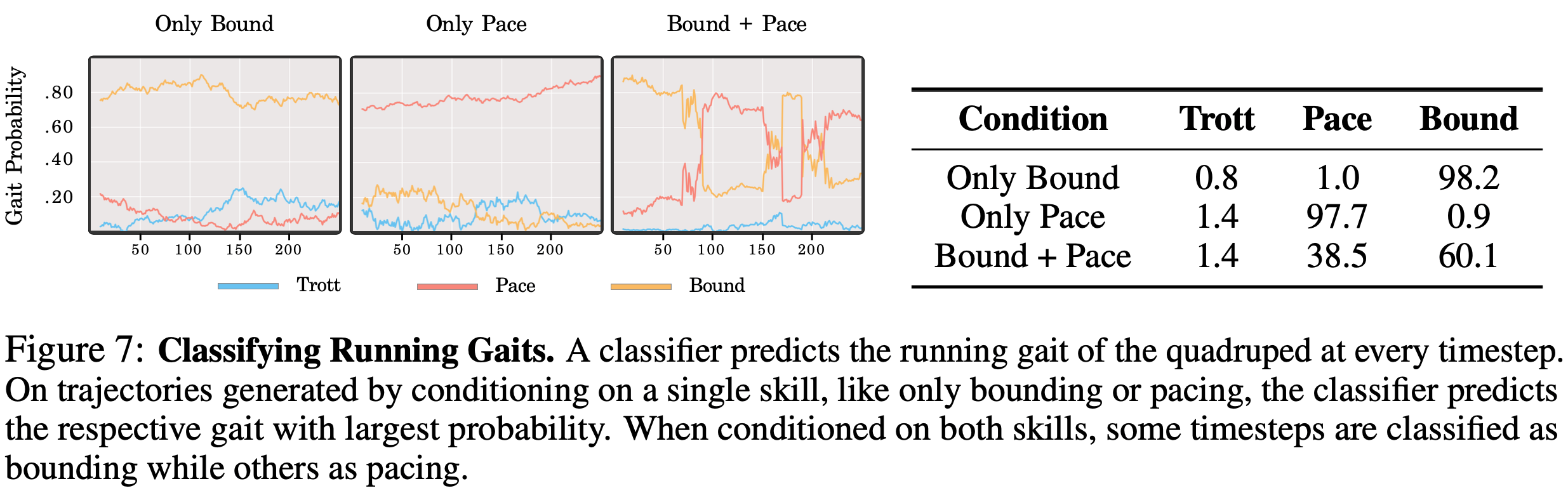
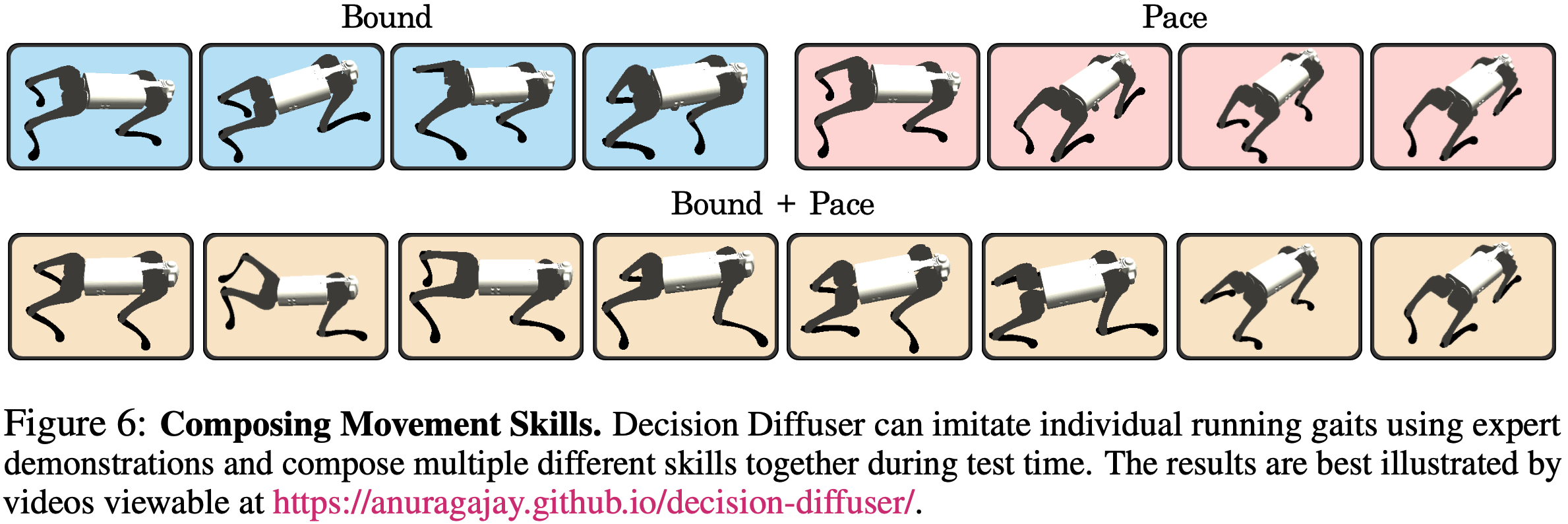
组合技能
- 实验设置
- 在数据集中收集包含单一技能的轨迹,然后让机器人学习各种步态,如跳跃 (bounding) 、踱步 (pacing) 和小跑 (trotting)
- 采样时,要求机器人能按照组合步态执行运动
- 实验结果
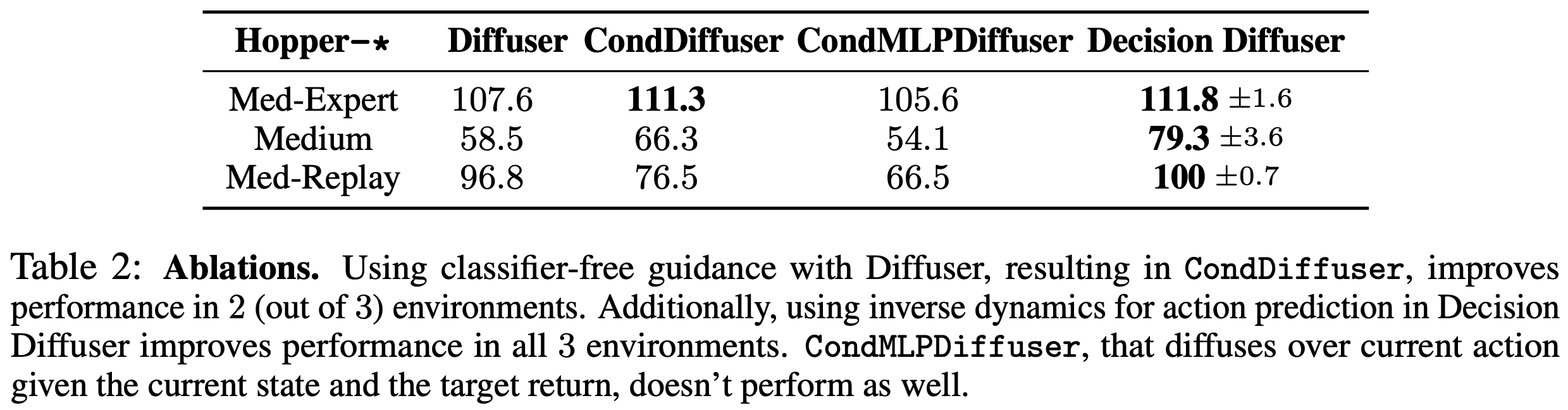
消融实验
实验设置:
- CondDiffuser :与 Diffuser 完全一致(轨迹同时纳入了状态和动作),但是没有使用 classifier guidance 而是 classifier-free guidance,输出动作不通过逆向动力学模型,而是由扩散模型去噪得到
we also compare with the baseline CondDiffuser, which diffuses over both state and action sequences as in Diffuser without classifier-guidance
- CondMLPDiffuser :根据state和target return来去噪生成动作(TODO问题:这个实验设置是想验证什么?target return是如何生成的?)
We also compare against CondMLPDiffuser, a policy where the current action is denoised according to a diffusion process conditioned on both the state and return
- CondDiffuser :与 Diffuser 完全一致(轨迹同时纳入了状态和动作),但是没有使用 classifier guidance 而是 classifier-free guidance,输出动作不通过逆向动力学模型,而是由扩散模型去噪得到
实验结论
补充实验(回答为什么不直接通过Diffusion生成动作,而是在已知状态 \((s,s’)\) 的情况预测动作)
- 实验结果:
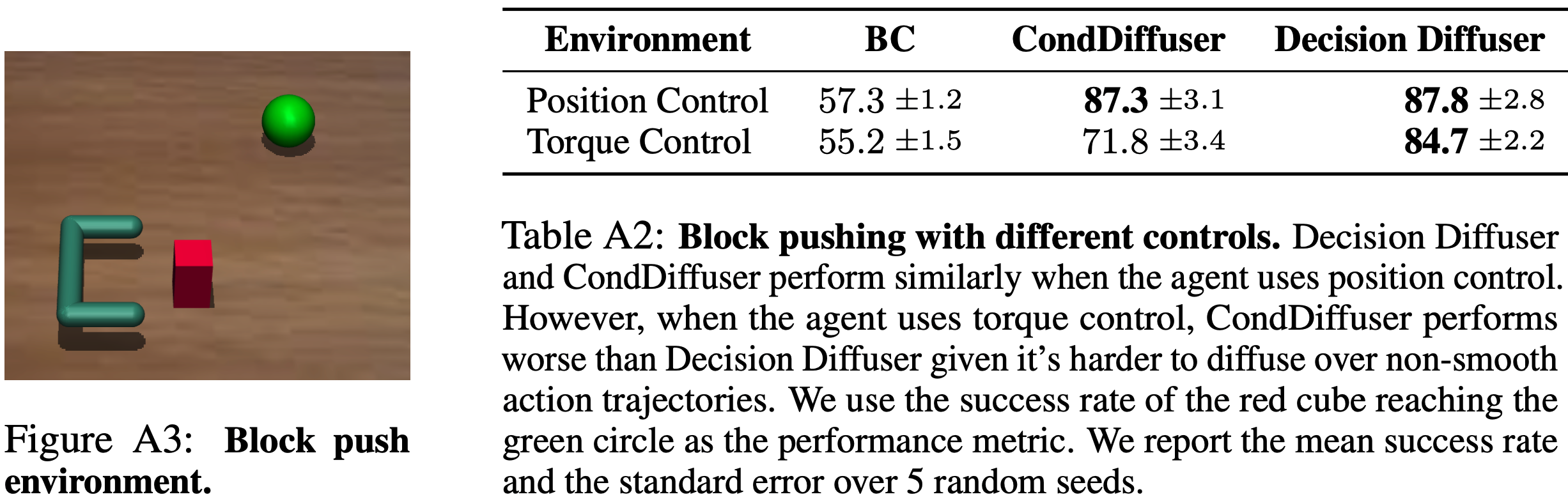
- 在位姿控制(position control)模式下,CondDiffuser 和 Decision Diffuser 的性能差不多;
- 在扭矩控制(torque control)模式下,Decision Diffuser 表现明显优于 CondDiffuser
- 总结来说:较为平滑的动作可以直接使用Diffusion生成,但是对于不平滑的动作,建议使用逆向动力学模型来建模动作
- 实验结果:
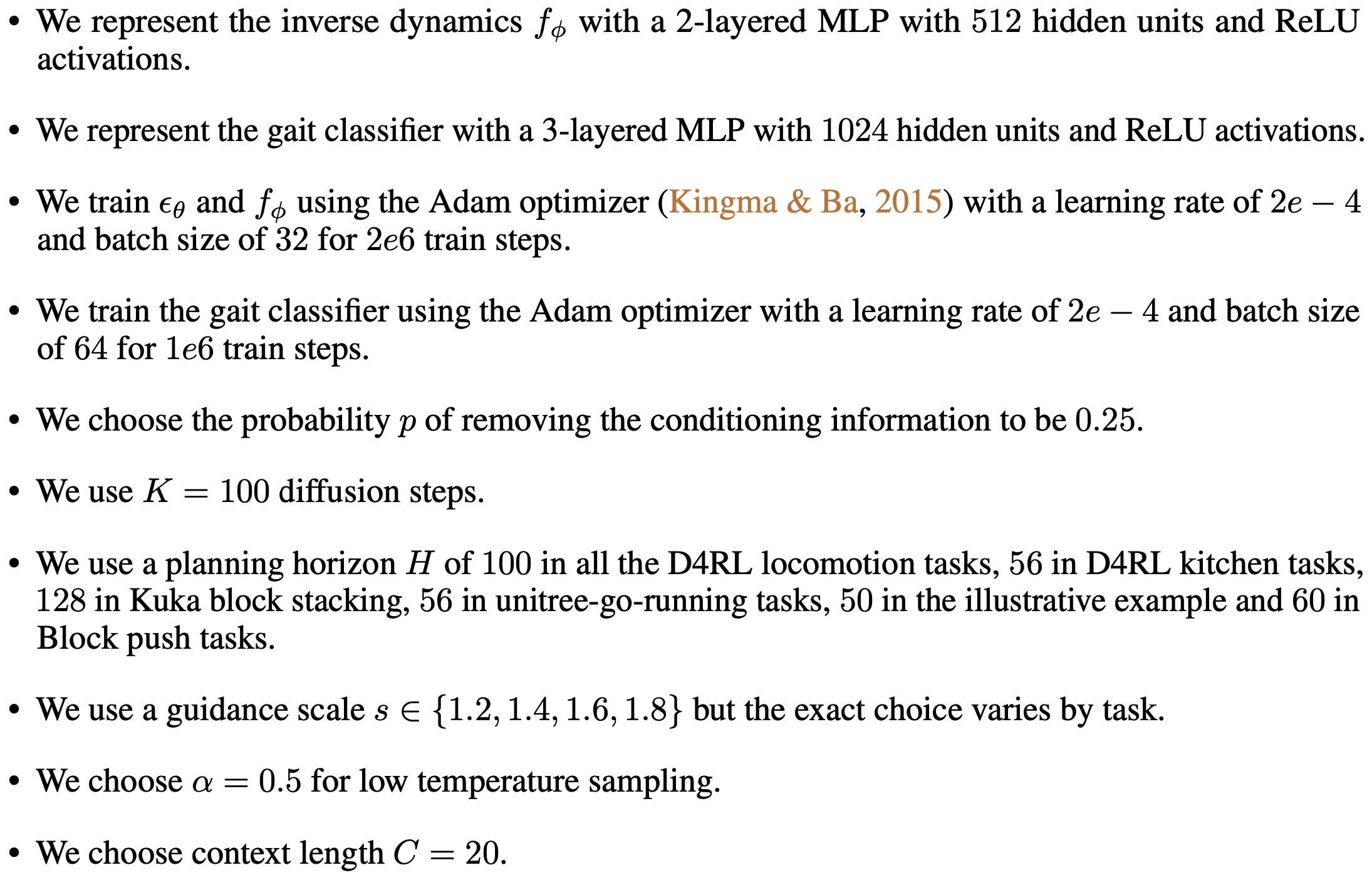
超参数设置
- 超参数设置如下(From Is Conditional Generative Modeling all you need for Decision-Making?, MIT, ICLR 2023附录B)
附录:关于Guidance scale的讨论
- Decision Diffuser使用的是Classifier-free Guidance方法,但是 \(\bar{\epsilon}_\theta(x_t, y, t)\) 的计算与原始论文Classifier-Free Diffusion Guidance, Google Research, Brain team, 2022对不齐
- 一个说明:AIGB论文写的使用的w=0.2,但代码使用的1.2,Decision-Diffusion论文写的guidance scale s=1.2,代码使用的w=1.2
- 在论文Classifier-Free Diffusion Guidance中,下面的 \(w\) 我们称为 \(w_\text{cdf}\):
$$
\begin{aligned}
\bar{\boldsymbol{\epsilon}}_\theta(\mathbf{x}_t, t, y)
&= \color{red}{\boldsymbol{\epsilon}_\theta(\mathbf{x}_t, t, y)} + \color{red}{w} \big(\boldsymbol{\epsilon}_\theta(\mathbf{x}_t, t, y) - \boldsymbol{\epsilon}_\theta(\mathbf{x}_t, t) \big) \\
&= (w+1) \boldsymbol{\epsilon}_\theta(\mathbf{x}_t, t, y) - w \boldsymbol{\epsilon}_\theta(\mathbf{x}_t, t)
\end{aligned}
$$ - 在Decision Diffuser中,下面的 \(w\) 我们称为 \(w_\text{dd}\),实际上,论文GLIDE也使用的这种表达:
$$\hat{\epsilon} = \color{red}{\epsilon_\theta(\boldsymbol{x}_k(\tau), k)} + \color{red}{w}(\epsilon_\theta(\boldsymbol{x}_k(\tau),\boldsymbol{y}, k) - \epsilon_\theta(\boldsymbol{x}_k(\tau), k))$$ - 两者的表达式不同,但是本质上,通过调整他们的 guidance scale \(w\) 可以得到相同结论,具体地,可以证明,当 \(w_\text{cfd} = w_\text{dd} - 1\) 时,两者等价
$$
\begin{aligned}
\epsilon(y) + w_\text{cdf}(\epsilon(y)-\epsilon) &= \epsilon(y) + (w_\text{dd} - 1)(\epsilon(y)-\epsilon) \\
&= \epsilon(y) + w_\text{dd} \epsilon(y) - \epsilon(y) - w_\text{dd} \epsilon + \epsilon \\
&= \epsilon + w_1(\epsilon(y)-\epsilon)
\end{aligned}
$$ - 实际应用时,Classifier-Free Diffusion Guidance中 \(w_\text{cdf} > 0\) 即可,而Decision Diffuser 和论文GLIDE中要求 \(w_\text{dd} > 1.0\) 即可
- Decision Diffuser原始论文中未见到 \(w_\text{dd} > 1.0\) 的表达,但是附录B中有超参数 guidance scale \(s \in \{1.2,1.4,1.6,1.8\}\) 这样的表达 (注意,这里的 \(s=w\) 论文中常常混淆使用)
- 论文GLIDE中则明确有 guidance scale \(s \ge 1.0\) 的表达 (注意,这里的 \(s=w\) 论文中常常混淆使用)
- Decision Diffuser这种用法有一个好处,可以通过不同Diffusion误差函数相加实现满足多个条件 \(\epsilon_\theta(\boldsymbol{x}_k(\tau),\boldsymbol{y}^i(\tau), k)\) 的采样形式
$$\hat{\epsilon} := \epsilon_\theta(\boldsymbol{x}_k(\tau),\varnothing, k) + \omega \sum_{i=1}^n (\epsilon_\theta(\boldsymbol{x}_k(\tau),\boldsymbol{y}^i(\tau), k) - \epsilon_\theta(\boldsymbol{x}_k(\tau), \varnothing, k))$$
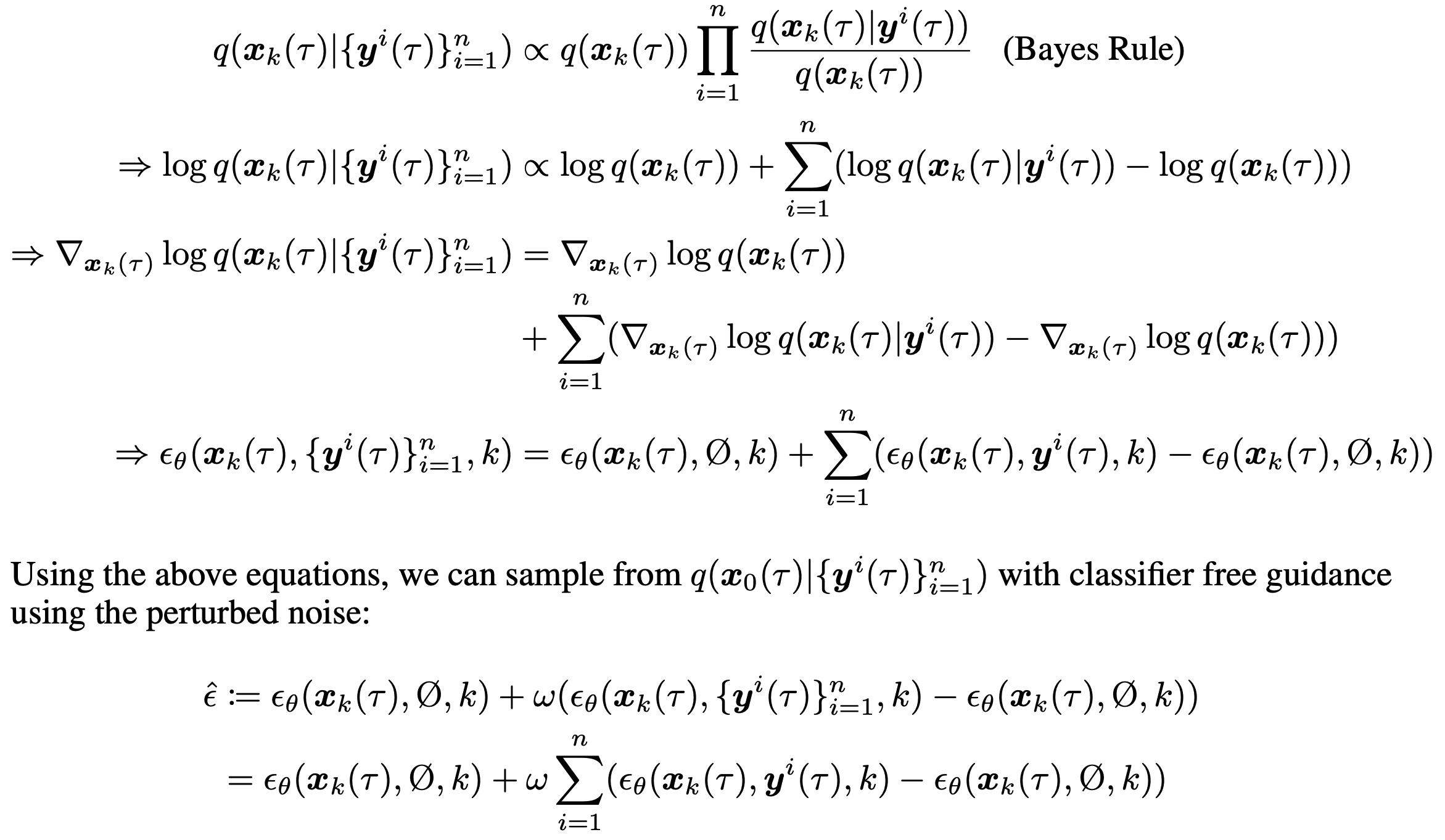
附录:多条件组合的证明
- 证明过程如下(From Is Conditional Generative Modeling all you need for Decision-Making?, MIT, ICLR 2023附录D):
条件为空和不满足约束都为 0?
- 在论文中提到条件为空时,去隐向量为0,不满足约束时也是置为0,如果条件为空或者不满足约束都取0值,那么两者会混淆吧,如何理解这种情况?
- 理解:
- 使用 one-hot 来编码时,除非所有约束都不满足才会取值为0,不满足约束的情况和条件为空的情况本质上都是无约束的情况,所以两者等价?