本文从梯度下降(Gradient Descent, GD)开始,讲述深度学习中的各种优化算法(优化器,Optimizer)
参考文章:【干货】深度学习必备:随机梯度下降(SGD)优化算法及可视化
三种梯度下降框架
随机梯度下降(Stochastic Gradient Descent, SGD)
核心思想
- 每次从随机从训练集中选择一个训练样本来计算误差,进而更新模型参数
- 单次迭代时参数移动方向可能不太精确甚至相反,但是最终会收敛
- 单次迭代的波动也带来了一个好处,可以到达一个更好的局部最优点,甚至到达全局最优点
参数更新公式
- 公式: \(\theta=\theta-\lambda\frac{\partial L(\theta;x_{i};y_{i})}{\partial \theta}\)
- 其中: \(L(\theta;x_{i};y_{i})=L(f(\theta;x_{i}),y_{i})\)
批量梯度下降(Batch Gradient Descent, BGD)
核心思想
- 每次使用全量的训练集样本(假设共 m 个)来计算误差,进而更新模型参数
- 每次参数能够朝着正确的方向移动
- 每次遍历所有数据,耗费时间较长
参数更新公式
- 公式:\(\theta=\theta-\lambda\frac{\partial L(\theta;x_{1:m};y_{1:m})}{\partial \theta}\)
- 一般来说:\(L(\theta;x_{1:m};y_{1:m}) = \frac{1}{m}\sum_{i=1}^{m} L(\theta;x_{i};y_{i})\)
小批量梯度下降(Mini-Batch Gradient Descent, MBGD)
核心思想
- 每次从随机从训练集中选择k(k < m)个训练样本来计算误差,进而更新模型参数
- 介于SGD和BGD之间
- 波动小
- 内存占用也相对较小
参数更新公式
- 公式: \(\theta=\theta-\lambda\frac{\partial L(\theta;x_{i:i+k};y_{i:i+k})}{\partial \theta}\)
- 一般来说: \(L(\theta;x_{1:k};y_{1:k}) = \frac{1}{k}\sum_{i=1}^{k} L(\theta;x_{i};y_{i})\)
总结
优点
- 梯度下降算法应用广泛,算法效果很好
缺点
学习速率
- 大小很难确定,太大容易震荡,太小则收敛太慢
- 学习速率一般为定值,有时候会实现为逐步衰减
- 但是无论如何,都需要事前固定一个值,因此无法自适应不同的数据集特点
局部最优
- 对于非凸的目标函数,容易陷入局部极值点中
- 比局部极值点更严重的问题:有时候会嵌入鞍点?
SGD 算法的优化
Momentum法(动量法)
核心思想
- 考虑一种情况,在峡谷地区(某些方向比另一些方向陡峭很多)
- SGD (或者 MBGD,实际上,SGD 是特殊的 MBGD,平时可以认为这两者是相同的东西)会在这些放附近振荡,从而导致收敛速度变慢
- 这里最好的例子是鞍点,鞍点出的形状像一个马鞍,一个方向两头上翘,一个方向两头下垂,当上翘的方向比下垂的方向陡峭很多时,SDG和MDG等方法容易在上翘方向上震荡
- 此时动量可以使得
- 当前梯度方向与上一次梯度方向相同的地方进行加强,从而加快收敛速度
- 当前梯度方向与上一次梯度方向不同的地方进行削减,从而减少振荡
- 动量可以理解为一个从山顶滚下的小球,遇到新的力(当前梯度)时,会结合之前的梯度方向决定接下来的运动方向
参数更新公式
- 公式:\(\theta=\theta-m_{t}\)
- \(m_{t}\) 表示当前下降方向, \(m_{t-1}\) 表示上一次的下降方向
- \(m_{t}=\gamma m_{t-1}+\lambda\frac{\partial L(\theta;x_{i};y_{i})}{\partial \theta}\)
- \(\gamma<1\),值一般取0.9
- \(\gamma m_{t-1}\) 是动量项
- \(\gamma\) 是衰减量
- \(\lambda\) 是学习率
图示
- 动量相关图示:


小结
- 学习过程
- 从训练集中的随机抽取一批容量为m的样本 \({x_{1},…,x_{m}}\),以及相关的输出 \({y_{1},…,y_{m}}\)
- 计算梯度和误差,更新v和参数 \(\theta\)
NAG,涅斯捷罗夫梯度加速法(Nesterov Accelerated Gradient)
核心思想
- 继续考虑普通的 SDG 算法,添加了 Momentum,此时从山顶滚下的球会盲目的选择斜坡
- 更好的方式是在遇到向上的斜坡时减慢速度
- NAG在计算梯度时首先获取(近似获得)未来的参数而不是当前参数,然后计算未来参数对应的损失函数的梯度
- NAG在预测了未来的梯度后,根据未来(\(\theta - \gamma m_{t-1}\))梯度方向和之前梯度的方向决定当前的方向, 这样可以保证在遇到下一点为上升斜坡时适当减慢当前点的速度(否则可能由于惯性走上斜坡, 提前知道 \(\theta - \gamma m_{t-1}\) 处的梯度, 从而保证不要走上去), 从而找到了比Momentum超前的更新方向
- 对比: Momentum是根据当前梯度方向和之前梯度方向决定当前的方向
参数更新公式
- 公式:\(\theta=\theta-m_{t}\)
- \(m_{t}=\gamma m_{t-1}+\lambda\frac{\partial L(\theta - \gamma v_{t-1};x_{i};y_{i})}{\partial \theta}\)
- NAG使用的是未来的梯度方向(Momentum使用的是当前梯度方向)和之前的梯度方向
图示
- Momentum(动量)法首先计算当前的梯度值(小蓝色向量),然后在更新的积累向量(大蓝色向量)方向前进一大步
- NAG 法则首先(试探性地)在之前积累的梯度方向(棕色向量)前进一大步,再根据当前地情况修正,以得到最终的前进方向(绿色向量)
- 这种基于预测的更新方法,使我们避免过快地前进,并提高了算法地响应能力(responsiveness),大大改进了 RNN 在一些任务上的表现


- 公式中 \(-\gamma m_{t-1}\) 对应BC向量
- \(\theta-\gamma m_{t-1}\) 就对应C点(参数)
小结
- Momentum和NAG法可以使得参数更新过程中根据随时函数的斜率自适应的学习,从而加速SGD的收敛
- 实际应用中,NAG将比Momentum收敛快很多
- 学习过程
- 从训练集中的随机抽取一批容量为m的样本 \({x_{1},…,x_{m}}\),以及相关的输出 \({y_{1},…,y_{m}}\)
- 计算梯度和误差,更新 v 和参数 \(\theta\)
Adagrad
核心思想
- 对于较少出现的特征,使用较大的学习率更新,即对低频的参数给予更大的更新
- 对于较多出现的特征,使用较小的学习率更新,即对高频的参数给予更小的更新
- 很适合处理稀疏数据
参数更新公式
- 计算梯度
- 分量形式: \(g_{t,k} = \frac{\partial L(\theta;x_{i};y_{i})}{\theta}|_{\theta = \theta_{t-1,k}}\)
- \(g_{t,k}\) 是指第t次迭代时第k个参数 \(\theta_{t-1, k}\) 的梯度
- 有些地方会这样表达: \(g_{t,k} = \frac{\partial L(\theta_{t-1,k};x_{i};y_{i})}{\theta_{t-1,k}}\)
- 式子中使用 \(\theta_{t-1, k}\) 在梯度中,事实上不够严谨, 容易让人误解分子分母都不是函数,而是一个确定的值, 事实上我们是先求了导数然后再带入 \(\theta = \theta_{t-1}\) 的
- 向量形式: \(g_{t} = \frac{\partial L(\theta;x_{i};y_{i})}{\partial \theta}|_{\theta=\theta_{t-1}}\)
- 分量形式: \(g_{t,k} = \frac{\partial L(\theta;x_{i};y_{i})}{\theta}|_{\theta = \theta_{t-1,k}}\)
- 此时普通的SGD如下更新参数
- 分量形式: \(\theta_{t,k} = \theta_{t-1,k} - \lambda g_{t,k}\)
- 向量形式: \(\theta_{t} = \theta_{t-1} - \lambda g_{t}\)
- 而Adagrad对学习率 \(\lambda\) 根据不同参数进行了修正
- 分量形式: \(\theta_{t,k} = \theta_{t-1,k} - \frac{\lambda}{\sqrt{G_{t,kk}+\epsilon}} g_{t,k}\)
- \(G_{t,kk}=\sum_{r=1}^{t}(g_{r,k})^{2}\)
- 向量形式: \(\theta_{t} = \theta_{t-1} - \frac{\lambda}{\sqrt{G_{t}+\epsilon}}\bigodot g_{t}\)
- \(G_{t}=\sum_{r=1}^{t}g_{r}\bigodot g_{r}\)
- \(\bigodot\) 表示按照对角线上的值与对应梯度相乘
- 进一步可以简化写为: \(G_t = G_{t-1} + g_t^2\)
- 注意: 这里 \(g_t^2\) 是指向量按照维度分别相乘, 计算后还是原始向量维度
- G是一个对角矩阵,对角线上的元素(\(G_{k,k}\))是从一开始到k次迭代目标函数对于参数(\(\theta_{k}\))的梯度的平方和
- G的累计效果保证了出现次数多的参数(\(\theta_{k}\))对应的对角线上的元素(\(G_{k,k}\))大,从而得到更小的更新
- \(\epsilon\) 是一个平滑项,用于防止分母为0
- 分量形式: \(\theta_{t,k} = \theta_{t-1,k} - \frac{\lambda}{\sqrt{G_{t,kk}+\epsilon}} g_{t,k}\)
- 总结参数更新公式:
- \(\theta_{t} = \theta_{t-1} - \frac{\lambda}{\sqrt{G_{t}+\epsilon}} g_{t}\)
- \(g_{t} = \frac{\partial L(\theta;x_{i};y_{i})}{\partial \theta }|_{\theta = \theta_{t-1}}\)
- \(G_t = G_{t-1} + g_t^2\)
小结
- 在分母上累计了平方梯度和 ,造成训练过程中G的对角线元素越来越大 ,最终导致学习率非常小 ,甚至是无限小的值,从而学不到东西
- 学习过程
- 从训练集中的随机抽取一批容量为m的样本 \({x_{1},…,x_{m}}\),以及相关的输出 \({y_{1},…,y_{m}}\)
- 计算梯度和误差,更新G的每个元素,再根据G以及梯度计算参数更新量
Adadelta
核心思想
- 是Adagrad的一个扩展,目标是解决Adagrad学习率单调下降的问题
- 解决方案:只累计一段时间内的平方梯度值?
- 实际上实现是累加时给前面的平方梯度和一个衰减值
- 方法名delta的来源是选取部分
参数更新公式
- 将矩阵G的每一项变成当前梯度平方加上过去梯度平方的衰减值(指数衰减)即可
- 指数衰减:前n-1项的系数是衰减率的n-1次方
- 实现指数衰减
- 在Adagrad的基础上修改为: \(G_t = \gamma G_{t-1} + (1-\gamma)g_t^2\)
- 注意: 这里 \(g_t^2\) 是指向量按照维度分别相乘, 计算后还是原始向量维度
- 我们通常也把 \(G_t\) 表达为 \(E[g^2]_t\)
- 因为修改后的 \(G_t\) 可以视为于对 \(g_t^2\) 求期望(不同的 \(t\) 概率权重不一样的分布的期望)
- 进一步表达为: \(E[g^2]_t = \gamma E[g^2]_{t-1} + (1-\gamma)g_t^2\)
小结
- 经过衰减后,G 的每一项(忽略掉平滑项 \(\epsilon\))相当于有权重的梯度均方差(Root Mean Square, RMS),后面RMSprop算法就用了这个RMS来命名
- 均方根的定义是:对所有数求平方和,取平均值(每一项的权重根据概率分布可以不同),再开方
- 学习过程
- 从训练集中的随机抽取一批容量为m的样本 \({x_{1},…,x_{m}}\),以及相关的输出 \({y_{1},…,y_{m}}\)
- 计算梯度和误差,更新G的每个元素,再根据G以及梯度计算参数更新量
RMSprop(Root Mean Square prop)
核心思想
- 一种适应性学习率方法,至今未公开发表
- 是Adagrad的一个扩展,目标也是解决Adagrad学习率单调下降的问题
- RMS的来源是由于分母相当于(忽略掉平滑项 \(\epsilon\))是梯度的均方根(Root Mean Squared, RMS)
参数更新公式
- 参见Adadelta
- RMSprop的本质是对Adadelta简单的取之前值和当前值的权重为 0.9 和 0.1 实现指数加权平均, 即 \(\gamma = 0.9\)
- 有些地方也说RMSprop权重取的是0.5和0.5实现指数加权平均即 \(\gamma = 0.5\)
- 学习率 \(\lambda\) 一般取值为0.001
小结
- RMSprop是Adadelta的一种特殊形式
- Adagrad的分母不能算是均方差(即使忽略平滑项 \(\epsilon\)),因为这里没有取平均值的操作
- 学习过程
- 从训练集中的随机抽取一批容量为m的样本 \({x_{1},…,x_{m}}\),以及相关的输出 \({y_{1},…,y_{m}}\)
- 计算梯度和误差,更新 G 的每个元素,再根据G以及梯度计算参数更新量
Adam(Adaptive Moment Estimation)
核心思想
- 一种适应性学习率方法,相当于 RMSprop + Momentum + Bias Correction
- 像 Adadelta 和 RMSprop 一样存储了梯度的平方的指数衰减平均值
- 像 Momentum 一样保持了过去梯度的指数衰减平均值
- Bias Correction 是为了得到期望的无偏估计
参数更新公式
- \(\theta_{t} = \theta_{t-1} - \frac{\lambda}{\sqrt{\tilde{v}_t+\epsilon}} \tilde{m}_t\)
- \(\tilde{v}_t=\frac{v_{t}}{1-\beta_{1}^{t}}\)
- \(\tilde{m}_t=\frac{m_{t}}{1-\beta_{2}^{t}}\)
- \(\lambda\) 是外层学习率,实际使用中,常常可以通过指数衰减、固定步长衰减、余弦退火衰减等学习率衰减策略更新
- 梯度的指数衰减: \(m_{t} = \beta_{2}m_{t-1}+(1-\beta_{2})g_{t}\)
- 梯度平方的指数衰减: \(v_{t} = \beta_{1}v_{t-1}+(1-\beta_{1})g_{t}^{2}\)
- \(m_t\) 和 \(v_t\) 也叫作一阶动量和二阶动量,是对梯度一阶矩估计和二阶矩估计
- 数学定义:随机变量的一阶矩是随机变量的期望 \(E[X]\),二阶矩是随机变量的方差 \(E[X-E[X]]\)
- 其实梯度平方的期望不是梯度的方差,这只是一种近似,数学上,随机变量 \(X\) 二阶矩等价于方差,是 \(E[(X-E[X])^2] = E[X^2]-E[X]^2\),当 \(E[X]=0\) 时, \(E[X^2]\) 就是方差
- 这种滑动平均之所以能代表期望,是因为滑动平均的思想是一种折扣平均,确实可以用来作为期望和方差的估计
- \(m_t\) 和 \(v_t\) 可以看做是对 \(E[g]_t\) 和 \(E[g^2]_t\) 的估计
- \(\tilde{m}_t\) 和 \(\tilde{v}_t\) 是对 \(m_t\) 和 \(v_t\) 的 Bias Correction , 这样可以近似为对对期望 \(E[g]_t\) 和 \(E[g^2]_t\) 的无偏估计
- 注意:修正项 \(\tilde{v}_t=\frac{v_{t}}{1-\beta_{1}^{t}}\) 中的 \(\beta_{1}^{t}\) 是 \(\beta_{1}\) 的 \(t\) 次方的意思,基本思路可以理解为在每一步都尽量将梯度修正到 \(t=0\) 大小
- 进行修正的原因是当 \(t\) 较小时, \(v_t\) 也较小,而 \(\beta\) 一般较大(0.9或者0.999),此时加权平均的结果也会很小,当 \(t\) 很大时,实际上可以不用修正了,个人理解:应该可以不用修正,只是前期训练时更新速度比较慢而已
- \(m_t\) 和 \(v_t\) 也叫作一阶动量和二阶动量,是对梯度一阶矩估计和二阶矩估计
小结
- 超参数设定推荐
- 梯度平方衰减率: \(\beta_{1}=0.999\)
- 梯度动量衰减率: \(\beta_{2}=0.9\)
- 平滑项: \(\epsilon=10e^-8=1*10^{-8}\)
- 一阶动量 \(v\),初始化为0
- 二阶动量 \(m\),初始化为0
- 学习过程
- 从训练集中的随机抽取一批容量为m的样本 \({x_{1},…,x_{m}}\),以及相关的输出 \({y_{1},…,y_{m}}\)
- 计算梯度和误差,更新 \(v\) 和 \(m\),再根据 \(v\) 和 \(m\) 以及梯度计算参数更新量
AdamW
Adam with Weight decay是Adam的一种优化
Adam中的L2正则
- 一般的L2正则
$$
Loss(w) = f(w) + \frac{1}{2}\eta||w||^2
$$ - 权重衰减后的参数更新如下
$$
\begin{align}
w &= w - \alpha\nabla Loss(w) \\
&= w - \alpha (\nabla f(w) + \eta w) \\
&= w - \alpha \nabla f(w) - \alpha \eta w \\
\end{align}
$$ - 由于L2正则化项的存在,每次权重更新时都会减去一定比例的权重,即 \(\alpha \eta w \),这种现象叫做权重衰减(L2正则的目标就是让权重往小的方向更新,所以L2正则也叫作权重衰减)
- L2正则也称为权重衰减,所以Adam优化的损失函数中添加L2正则的目标本应该也是为了权重衰减
- Adam中的L2正则
- 在每次求损失函数梯度前都计算 \(\nabla Loss(w) = \nabla f(w) + \eta w\)
- 由于L2正则项的梯度 \(\eta w\) 也会被累加到一阶动量和二阶动量中,带有L2的Adam不再是简单的权重衰减,L2正则项还会影响到其他值的更新
- Adam中的L2正则会产生我们不期望的结果,因为此时L2正则项影响了Adam参数的正常更新(我们想要L2做的仅仅是权重衰减,但在Adam中,L2产生了别的影响,这个不是我们想要的)
AdamW——Adam+权重衰减
- AdamW则不直接将L2添加到损失函数中,而是显示的把权重衰减提出来,主要修改是下面两步
- 在计算梯度时,将L2正则从损失函数中去除
- 在更新参数时,显示增加权重衰减项
- 相当于在更新参数时增加了L2正则,但是计算梯度时没有L2正则
- 原始论文:Decoupled Weight Decay Regularization
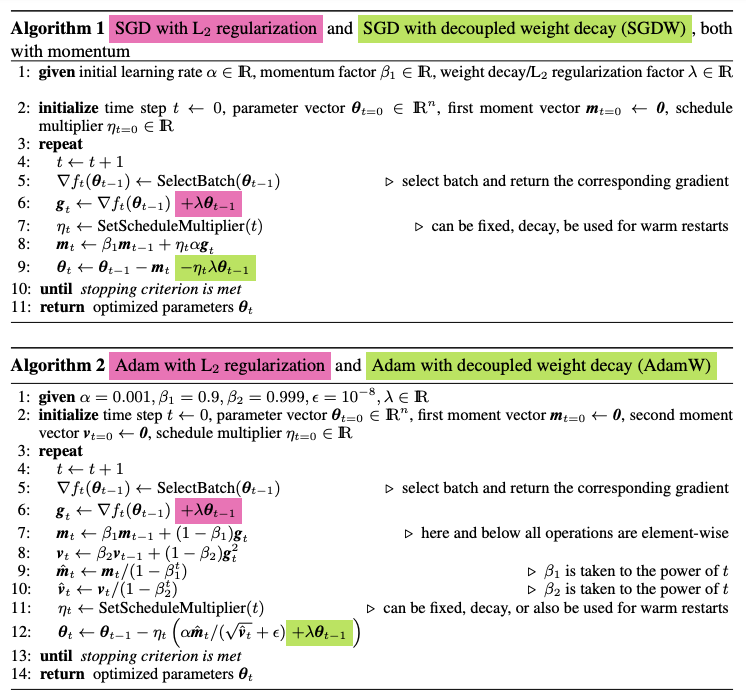
- 图中紫色是原始Adam+L2实现部分,在AdamW中会被去除;
- 绿色是AdamW中新增的权重衰减部分(相当于更新参数时增加了L2正则项)
- 参考链接:Adam和AdamW,从梯度下降到AdamW一文读懂机器学习优化算法
- 目前大模型常用的就是AdamW
优化器与内存/显存
- 训练的过程中,需要的内存/显存大小与优化器(Optimizer)有关
- 需要存储到内存的变量包括以下几个方面
- 梯度
- 参数
- 优化器状态(Optimizer States),普通 SGD 没有这一项,而Adam和AdamW则需要存储一阶动量和二阶动量
- 需要存储到内存的变量包括以下几个方面
- 优化器、参数量、内存/显存消耗、混合精度训练相关概念可参考ZeRO: Memory Optimizations Toward Training Trillion Parameter Models
- 有些论文中也会直接将二阶动量叫做方差(Variance)或者二阶矩,因为二阶动量可以近似方差(当期望为0时)
- ZeRO论文中指出,在混合精度训练 + Adam/AdamW 时,需要存储的变量包括
- FP16 的参数
- FP16 的梯度
- FP32 的参数
- FP32 的一阶动量
- FP32 的二阶动量
- 注意:动量不能使用 FP16 吗?是的,不能,因为为了精度考虑使用时还是要被转换到 FP32
各种优化方法的比较
鞍点
- SGD optimization on saddle point

等高线表面
- SGD optimization on loss surface contours

- 上面两种情况都可以看出,Adagrad, Adadelta, RMSprop 几乎很快就找到了正确的方向并前进,收敛速度也相当快,而其它方法要么很慢,要么走了很多弯路才找到
- 由图可知自适应学习率方法即 Adagrad, Adadelta, RMSprop, Adam 在这种情景下会更合适而且收敛性更好
如何选择
- 如果数据是稀疏的,就用自适用方法,即 Adagrad, Adadelta, RMSprop, Adam
- 因为他们能够为出现更新次数少(确切的说是梯度累计结果小)的特征分配更高的权重
- RMSprop, Adadelta, Adam 在很多情况下的效果是相似的
- Adam 可解释为 RMSprop + Momentum + Bias Correction
- 随着梯度变的稀疏,Adam 比 RMSprop 效果会好
- 整体来讲,Adam 是最好的选择
- 很多论文里都会用 SGD,没有 momentum 等, SGD 虽然能达到极小值,但是比其它算法用的时间长,而且可能会被困在鞍点, 在不正确的方向上来回震荡
- 如果需要更快的收敛,或者是训练更深更复杂的神经网络,需要用一种自适应的算法
epoch 粒度的学习率调整
- 本文中提到的常规的梯度下降方法中学习率均是在以 batch 为单位变化,即同一个 batch 学习率相同,而不同 batch 学习率可能不同
- 深度学习中还有一类学习率调整方法,是以 epoch 为单位变化的,即同一个 epoch 学习率相同,而不同 epoch 学习率可能不同
- 常见的 epoch 为单位变化的学习率有:
- StepLR:间隔调整学习率
- MultiStepLR:按设定的间隔调整学习率
- ExponentialLR︰按指数衰减调整学习率
- CosineAnnealingLR:以余弦函数为周期,在每个周期最大值时重置学习率
- CosineAnnealingWarmRestarts:CosineAnnealingLR 加上 warmup
- ReduceLROnPlateau:当某指标不再变化(下降或升高),调整学习率
- 如果以 epoch 为单位的学习率(如 StepLR)和以 batch 为单位的学习率(如 Adam)调整同时被设置,则:
- 两者会同时生效
- StepLR 负责在每个 epoch开始时调整学习率
- Adam 负责在每个 batch 开始时调整学习率
附录:关于 Adam 的更多讨论
- 参考链接:
- 如何理解Adam算法(Adaptive Moment Estimation)? - Summer Clover的回答 - 知乎
- 梯度下降法的神经网络容易收敛到局部最优,为什么应用广泛? - Summer Clover的回答 - 知乎
(1)正因为梯度下降法 容易收敛到局部最优,所以大家几乎从来不用梯度下降做非凸优化,包括 训练神经网络
(2)正因为随机梯度下降法 容易逃离鞍点 和泛化不好的 minima(主要是 sharp minima),所以 随机梯度下降(SGD)和它的变种(比如 Momentun、Adam)才是训练神经网络最流行的方法 - Who is Adam? 重新审视大模型 RLVR 阶段的优化器选择
Adam vs SGD 的优缺点简单总结
- Adam 更容易逃离鞍点
- Adam 对学习率超参数不敏感,一般在一个范围内的学习率即可实现最优,无需精确对学习率调参;但 SGD 对超参数非常敏感,不同场景下的最优超参数变化剧烈
- Adam 收敛更快
- Adam 需要额外存储两倍参数量的优化器状态,这对超大规模模型来说成本非常高
大模型中的 Adam 和 SGD 对比
- 参考链接:Who is Adam? 重新审视大模型 RLVR 阶段的优化器选择
- 注意:这里的讨论仅限于 RLVR 这种不需要更新太多参数的场景
- TLDR:大模型中,在做 RLVR 时,由于 RLVR 任务需要修改变化的参数较少(以 1e-5 变化量为阈值,大概 0.01% 量级参数发生变化),所以使用不带 Momentum 的 SGD 优化基本就够了,能省下来 Adam 下的很多优化器状态显存占用
- 在 RLVR 下 SGD vs Adam:
- SGD 审下来很多优化器状态,且效果和 Adam 差不多
- 使用 SGD 时,需要使用较大的学习率(Adam 1e-6 ~ 1e-5 是,SGD 需要 0.1 左右),且 SDG 对学习率超参敏感